Sanem Sarıel
Professor of Artificial Intelligence and Data Engineering
Professor of Artificial Intelligence and Data Engineering
PhD Dissertation
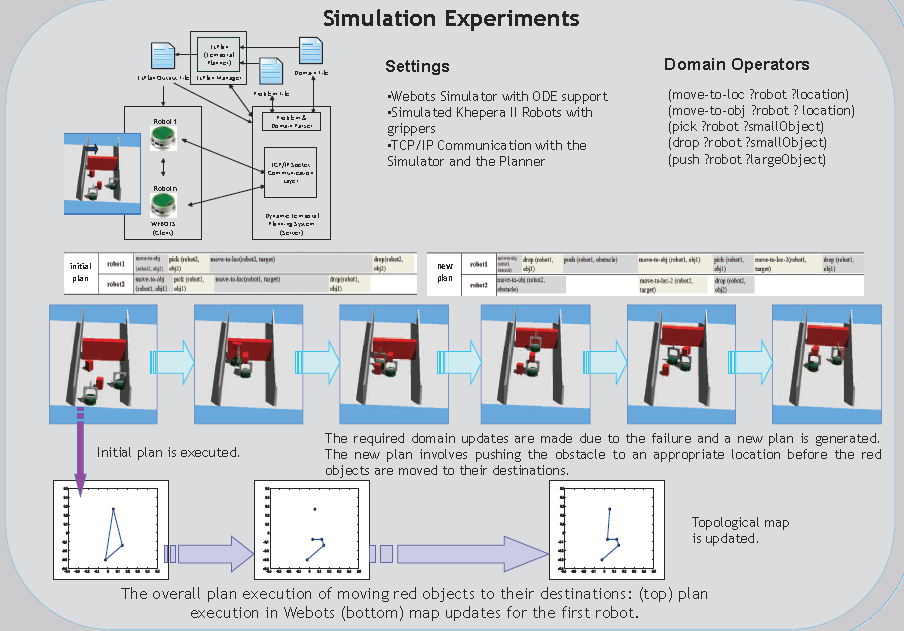
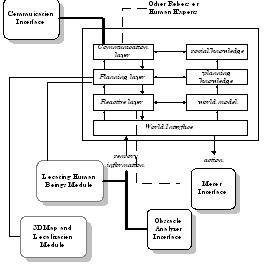
An Integrated Planning, Scheduling and Execution Framework for Multi-Robot Cooperation and Coordination, 2007
Advisors: Tucker Balch and Nadia Erdogan
Advisors: Tucker Balch and Nadia Erdogan
Books
RoboCup 2016: Robot World Cup XX
Sven Behnke, Raymond Sheh, Sanem Sariel, Daniel D. Lee
Springer, 2017, LNAI, Vol (9776)
Sven Behnke, Raymond Sheh, Sanem Sariel, Daniel D. Lee
Springer, 2017, LNAI, Vol (9776)
Articles in Turkish
Gunumuzde Yapay Zeka
Sanem Sariel
ITU Vakfi Yayini, Ocak - Mart 2017, Sayi 75, Insanlasan makineler ve yapay zeka Ozel Sayisi
Sanem Sariel
ITU Vakfi Yayini, Ocak - Mart 2017, Sayi 75, Insanlasan makineler ve yapay zeka Ozel Sayisi

Yapay Zekanin Gelecegi
Sanem Sariel
Muhendisname, ITU Mezunlari Dernegi Sureli Yayini, Sayi 45, Eylul 2015
Sanem Sariel
Muhendisname, ITU Mezunlari Dernegi Sureli Yayini, Sayi 45, Eylul 2015

Journal Papers
Hybrid humor: Investigating AI's potential in cartoon caption writing
Ugur Onal, Sanem Sariel, Metin Sezgin, Derya Akleman, Ergun Akleman
AI Magazine, 2026, Vol. 47(2)
Ugur Onal, Sanem Sariel, Metin Sezgin, Derya Akleman, Ergun Akleman
AI Magazine, 2026, Vol. 47(2)

Image Courtesy: Akleman 2024
Object-aware Interactive Perception for Tabletop Scene Exploration
Cagatay Koc and Sanem Sariel
Robotics and Autonomous Systems, 2024, Vol. 175
Cagatay Koc and Sanem Sariel
Robotics and Autonomous Systems, 2024, Vol. 175

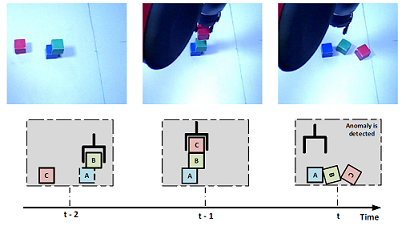
Multimodal Detection and Classification of Robot Manipulation Failures
Arda Inceoglu, Eren Erdal Aksoy and Sanem Sariel
IEEE Robotics and Automation Letters, 2024, 9(2), pp. 1396 - 1403
Arda Inceoglu, Eren Erdal Aksoy and Sanem Sariel
IEEE Robotics and Automation Letters, 2024, 9(2), pp. 1396 - 1403
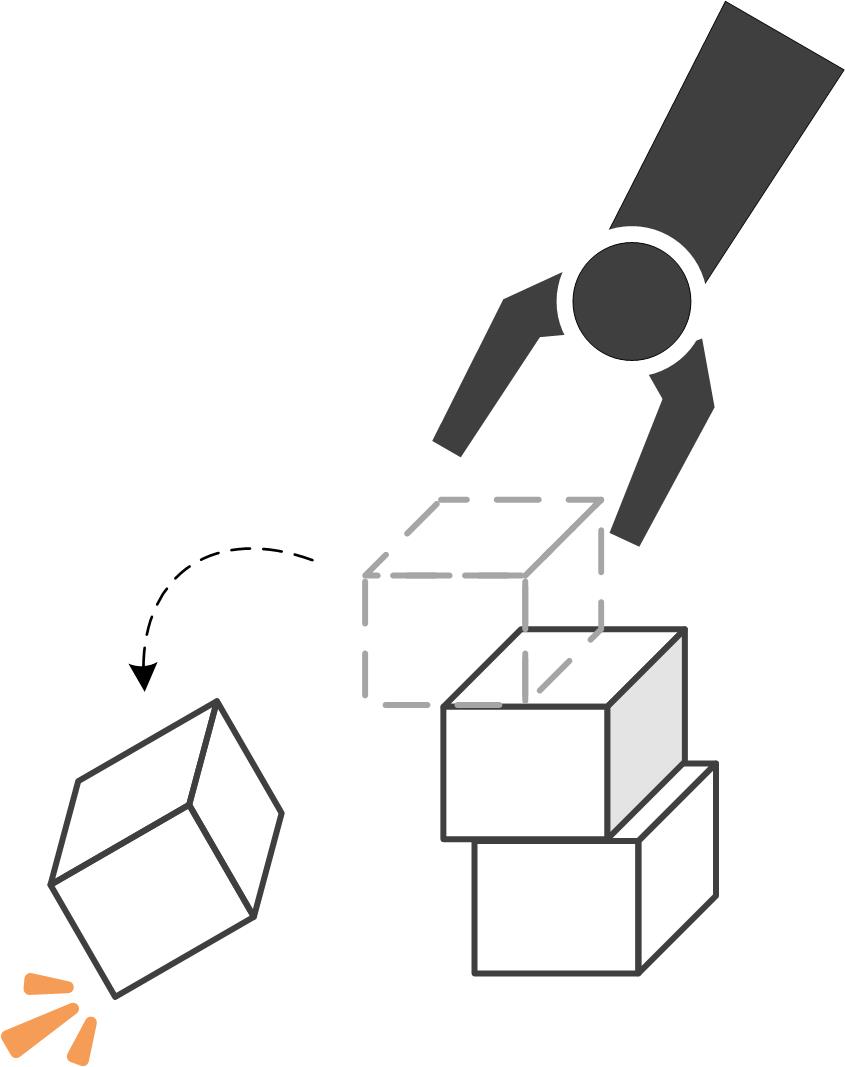
Learning Failure Prevention Skills for Safe Robot Manipulation
A. Cihan Ak, Eren Erdal Aksoy and Sanem Sariel
IEEE Robotics and Automation Letters, 2023, 8(12), pp. 7994 - 8001
A. Cihan Ak, Eren Erdal Aksoy and Sanem Sariel
IEEE Robotics and Automation Letters, 2023, 8(12), pp. 7994 - 8001
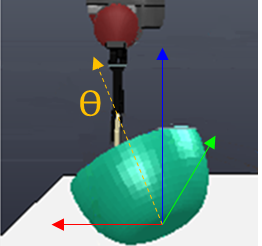
CLUE-AI: A Convolutional Three-stream Anomaly Identification Framework for Robot Manipulation
Dogan Altan and Sanem Sariel
IEEE Access, 2023, Vol 11 pp. 48347 - 48357
Dogan Altan and Sanem Sariel
IEEE Access, 2023, Vol 11 pp. 48347 - 48357

What went wrong? Identification of Everyday Object Manipulation Anomalies
Dogan Altan and Sanem Sariel
Intelligent Service Robotics, 2021, 14, pp. 215-234
Dogan Altan and Sanem Sariel
Intelligent Service Robotics, 2021, 14, pp. 215-234
Two-stage training algorithm for AI robot soccer
Taeyoung Kim, Luiz Felipe Vecchietti, Kyujin Choi, Sanem Sariel and Dongsoo Har
PeerJ Computer Science 7:e718, 2021
Taeyoung Kim, Luiz Felipe Vecchietti, Kyujin Choi, Sanem Sariel and Dongsoo Har
PeerJ Computer Science 7:e718, 2021

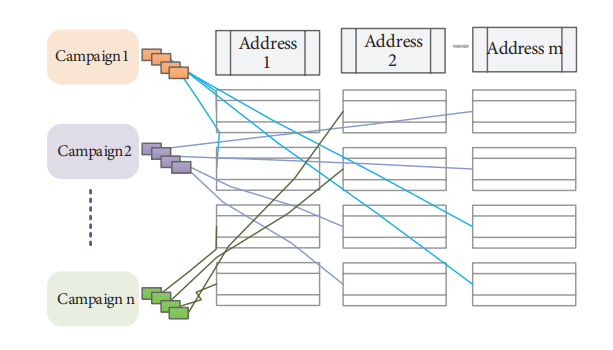
Optimization of Real-world Outdoor Campaign Allocations
Fatmanur Akdogan, Dogan Altan, Ercan Peker, M. Altug Ustun and Sanem Sariel
Turkish Journal of Electrical Engineering & Computer Sciences, 2020, 28(3), pp. 1276-1292
Fatmanur Akdogan, Dogan Altan, Ercan Peker, M. Altug Ustun and Sanem Sariel
Turkish Journal of Electrical Engineering & Computer Sciences, 2020, 28(3), pp. 1276-1292
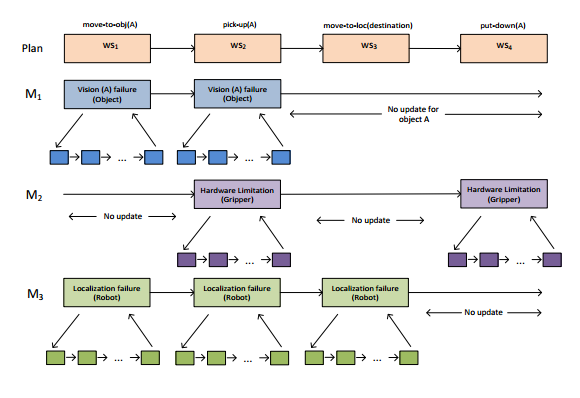
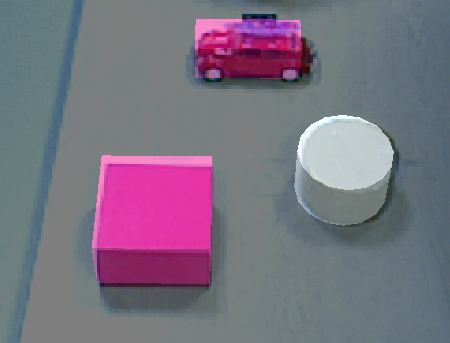
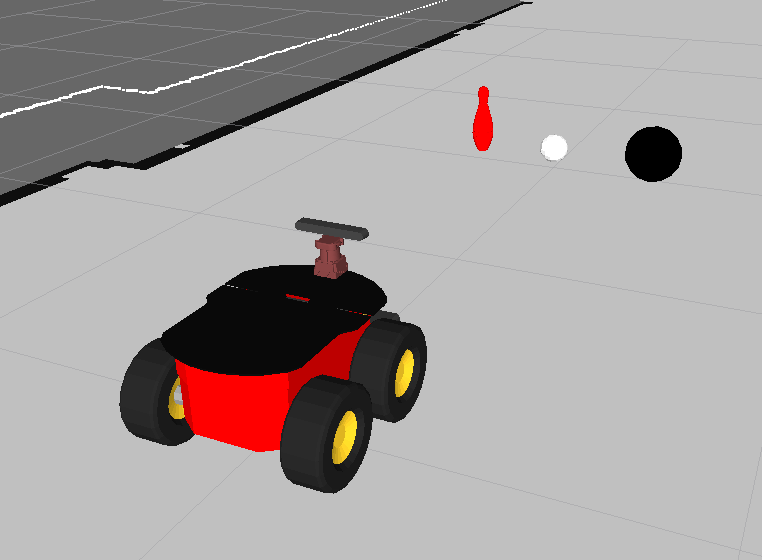
Continuous Visual World Modeling for Autonomous Robot Manipulation
Arda Inceoglu, Cagatay Koc, Besim Ongun Kanat, Mustafa Ersen and Sanem Sariel
IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, Vol 49(1), pp. 192-205
Arda Inceoglu, Cagatay Koc, Besim Ongun Kanat, Mustafa Ersen and Sanem Sariel
IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2019, Vol 49(1), pp. 192-205

Cognition-Enabled Robot Manipulation in Human Environments: Requirements, Recent Work, and Open Problems
Mustafa Ersen, Erhan ztop and Sanem Sariel
IEEE Robotics & Automation Magazine, 2017, Vol 27(3), pp. 108-122
Mustafa Ersen, Erhan ztop and Sanem Sariel
IEEE Robotics & Automation Magazine, 2017, Vol 27(3), pp. 108-122

Image Courtesy: Ingram Pub.
Cognitive robots learning failure contexts through real-world experimentation
Sertac Karapinar and Sanem Sariel
Autonomous Robots, Special Issue on Constrained Decision Making in Robotics, 2015, Vol 39(4), pp. 469-485
Sertac Karapinar and Sanem Sariel
Autonomous Robots, Special Issue on Constrained Decision Making in Robotics, 2015, Vol 39(4), pp. 469-485

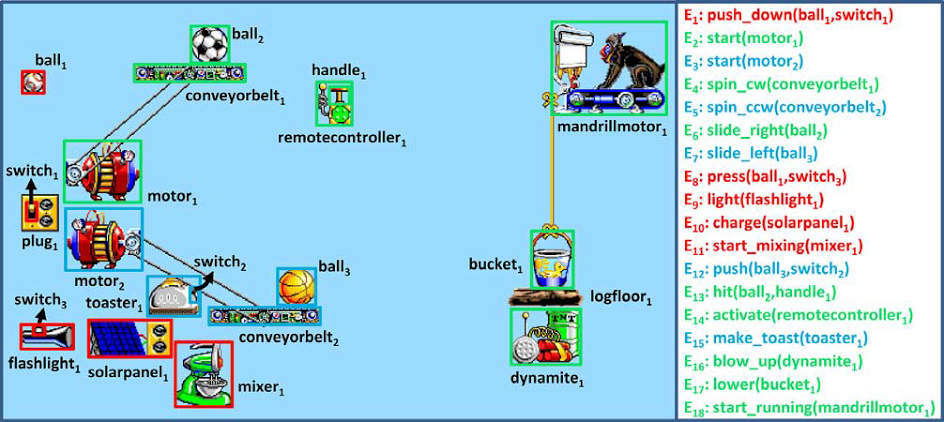
Learning Behaviors of and Interactions Among Objects Through Spatio-Temporal Reasoning
Mustafa Ersen and Sanem Sariel
IEEE Transactions on Computational Intelligence and AI in Games, 2015, Vol 7(1), pp. 75-87
Mustafa Ersen and Sanem Sariel
IEEE Transactions on Computational Intelligence and AI in Games, 2015, Vol 7(1), pp. 75-87
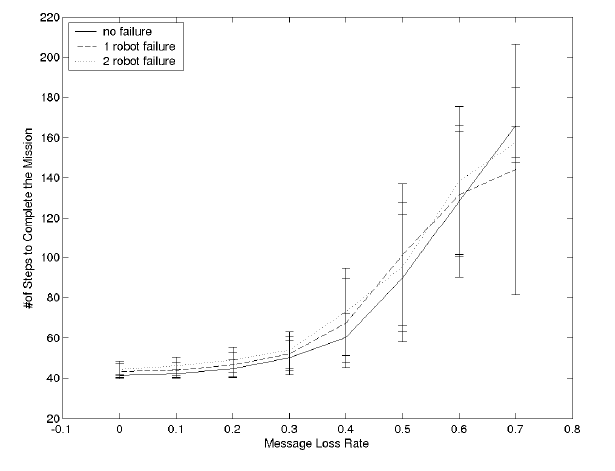
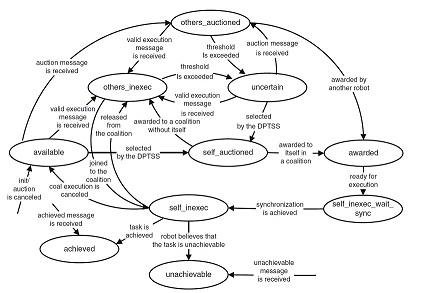
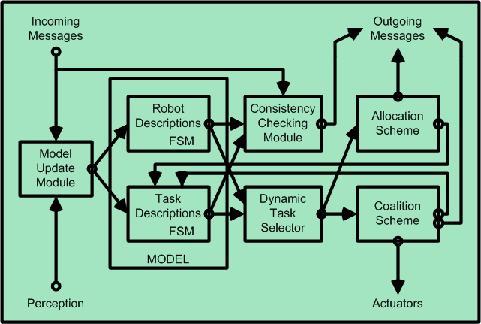
A Generic Framework for Distributed Multirobot Cooperation
Sanem Sariel-Talay, Tucker Balch and Nadia Erdogan
Journal of Intelligent & Robotic Systems, 2011, Vol 63(2), pp. 323-358
Sanem Sariel-Talay, Tucker Balch and Nadia Erdogan
Journal of Intelligent & Robotic Systems, 2011, Vol 63(2), pp. 323-358
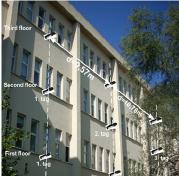
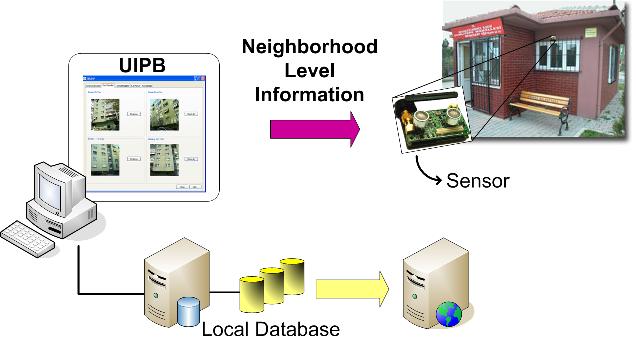
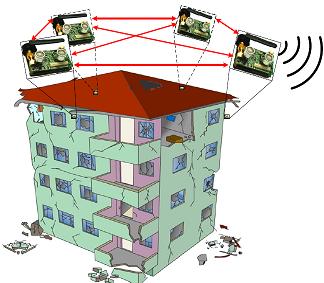
Local Information Access for Search and Rescue Using Wireless Data Storage Mediums
Esin Ergen, Sanem Sariel-Talay, Gursans Guven and Gurhan Avdan
Journal of Computing in Civil Engineering, 2011, Vol 25(4), pp. 263-274
Esin Ergen, Sanem Sariel-Talay, Gursans Guven and Gurhan Avdan
Journal of Computing in Civil Engineering, 2011, Vol 25(4), pp. 263-274

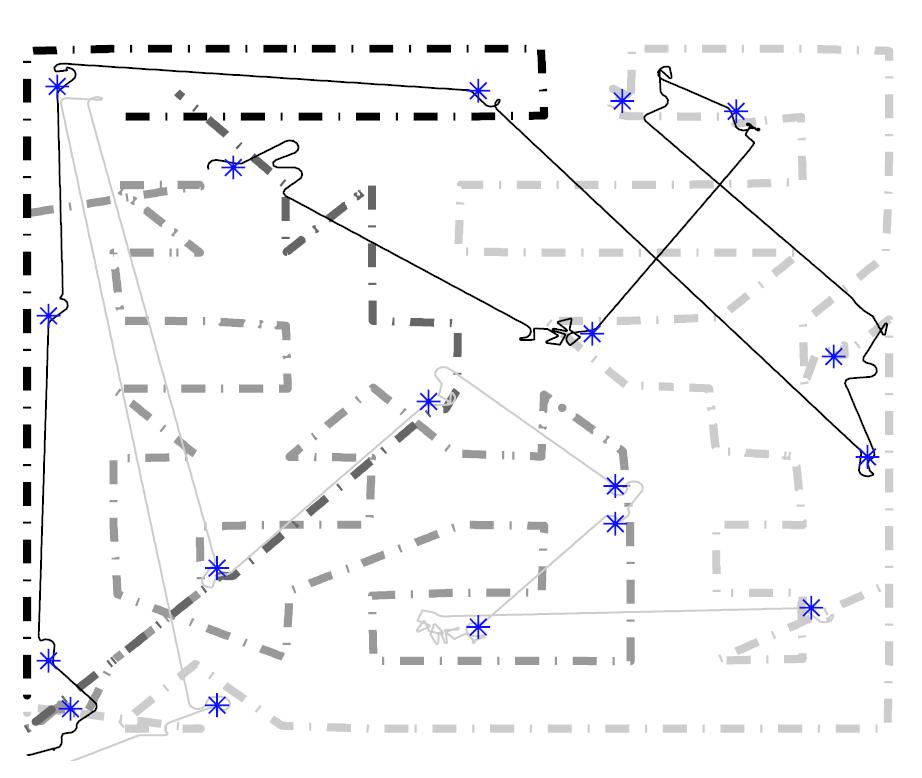
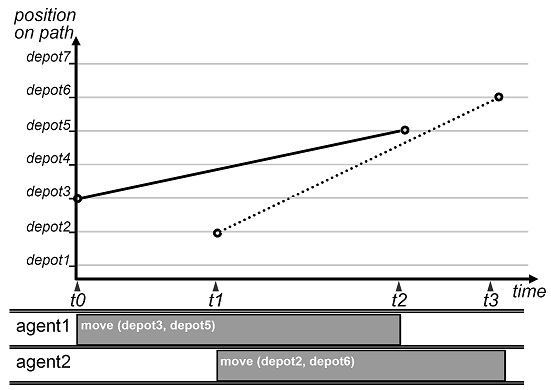
Multiple Traveling Robot Problem: A Solution Based on Dynamic Task Selection and Robust Execution
Sanem Sariel-Talay, Tucker Balch and Nadia Erdogan
IEEE/ASME Transactions on Mechatronics, Special Issue on Mechatronics in Multirobot Systems, 2009, Vol 14(2), pp. 198-206
Sanem Sariel-Talay, Tucker Balch and Nadia Erdogan
IEEE/ASME Transactions on Mechatronics, Special Issue on Mechatronics in Multirobot Systems, 2009, Vol 14(2), pp. 198-206

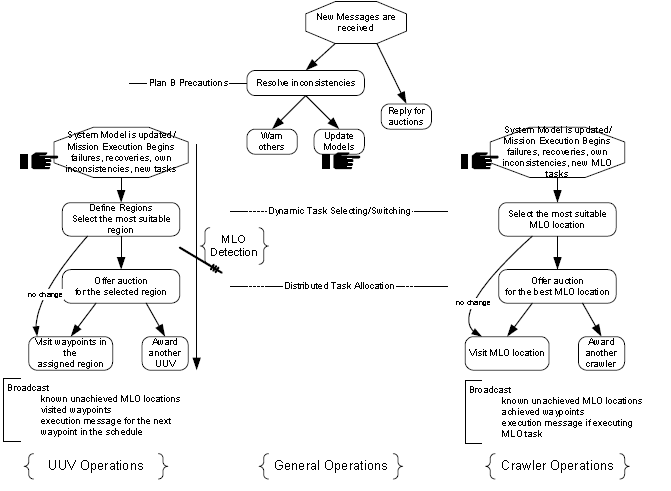
Naval Mine Countermeasure Missions: A Distributed, Incremental Multirobot Task Selection Scheme
Sanem Sariel, Tucker Balch and Nadia Erdogan
IEEE Robotics & Automation Magazine, Special Issue on Design, Control, and Applications of Real-World Multirobot Systems, 2008, Vol 15(1), pp. 45-52
Sanem Sariel, Tucker Balch and Nadia Erdogan
IEEE Robotics & Automation Magazine, Special Issue on Design, Control, and Applications of Real-World Multirobot Systems, 2008, Vol 15(1), pp. 45-52
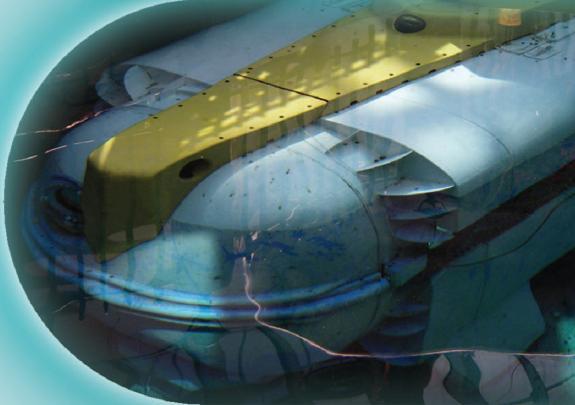
Image courtesy: Istockphoto
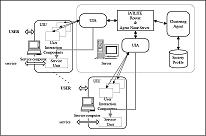
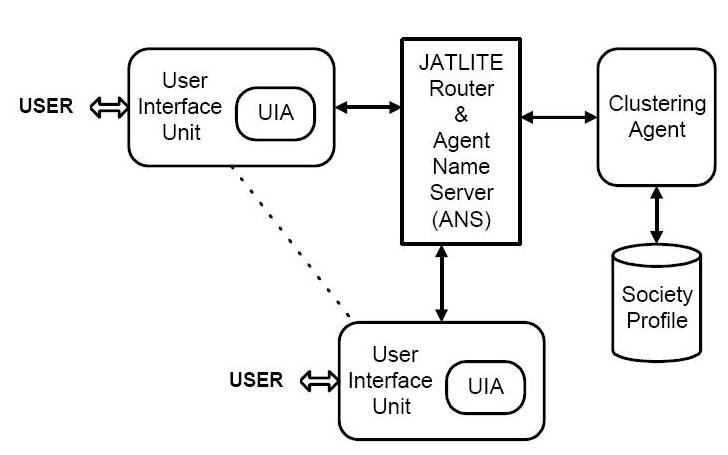
A Model for User Profiling Systems with Interacting Agents
Sanem Sariel and B. Tevfik Akgun
Turkish Journal of Electrical Engineering & Computer Sciences, Vol.13, 2005, pp.311-332
Sanem Sariel and B. Tevfik Akgun
Turkish Journal of Electrical Engineering & Computer Sciences, Vol.13, 2005, pp.311-332
Book Chapters and Lecture Notes Series
Empirical Analysis of Optimization Methods for the Real-World Dial-a-Ride Problem
Dilek Arikan, Cetin Oztoprak and Sanem Sariel
Applications of Evolutionary Computation. EvoApplications 2017, Lecture Notes in Computer Science, vol 10199, Springer, 2017, pp. 589-600
Dilek Arikan, Cetin Oztoprak and Sanem Sariel
Applications of Evolutionary Computation. EvoApplications 2017, Lecture Notes in Computer Science, vol 10199, Springer, 2017, pp. 589-600
A Distributed Multi-Robot Cooperation Framework for Real Time Task Achievement
Sanem Sariel and Tucker Balch
Distributed Autonomous Robotic Systems (DARS) 7, Springer Verlag ISBN:4431358781, 2006, pp. 187-196
(See also the Tech Report: Distributed Multi-AUV Coordination in Naval Mine Countermeasure Missions, GVU Tech Report GIT-GVU-06-04, 2006)
Sanem Sariel and Tucker Balch
Distributed Autonomous Robotic Systems (DARS) 7, Springer Verlag ISBN:4431358781, 2006, pp. 187-196
(See also the Tech Report: Distributed Multi-AUV Coordination in Naval Mine Countermeasure Missions, GVU Tech Report GIT-GVU-06-04, 2006)
Empirical Evaluation of Auction-Based Coordination of AUVs in a Realistic Simulated Mine Countermeasure Task
Sanem Sariel, Tucker Balch and Jason Stack
Distributed Autonomous Robotic Systems (DARS) 7, Springer Verlag ISBN:4431358781, 2006, pp. 197-206
(See also the Tech Report: Distributed Multi-AUV Coordination in Naval Mine Countermeasure Missions, GVU Tech Report GIT-GVU-06-04, 2006)
Sanem Sariel, Tucker Balch and Jason Stack
Distributed Autonomous Robotic Systems (DARS) 7, Springer Verlag ISBN:4431358781, 2006, pp. 197-206
(See also the Tech Report: Distributed Multi-AUV Coordination in Naval Mine Countermeasure Missions, GVU Tech Report GIT-GVU-06-04, 2006)
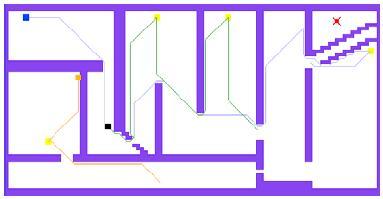
A Novel Search Strategy for Autonomous Search and Rescue Robots
Sanem Sariel and H. Levent Akin
RoboCup 2004, Lecture Notes in Artificial Intelligence, LNAI 3276, Springer-Verlag Berlin Heidelberg 2005, pp.459-466
Sanem Sariel and H. Levent Akin
RoboCup 2004, Lecture Notes in Artificial Intelligence, LNAI 3276, Springer-Verlag Berlin Heidelberg 2005, pp.459-466

A Gene Based Adaptive Mutation Strategy for Genetic Algorithms
Sima Uyar, Sanem Sariel and Gulsen Eryigit
Gecco 2004, Lecture Notes in Computer Science, LNCS 3103, pp. 271-281, Springer-Verlag Berlin Heidelberg, 2004
Sima Uyar, Sanem Sariel and Gulsen Eryigit
Gecco 2004, Lecture Notes in Computer Science, LNCS 3103, pp. 271-281, Springer-Verlag Berlin Heidelberg, 2004
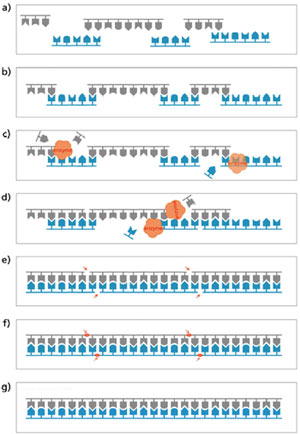
Image courtesy: adapaproject.org
Conference Papers - (
Please check here for conference papers published after 2014)
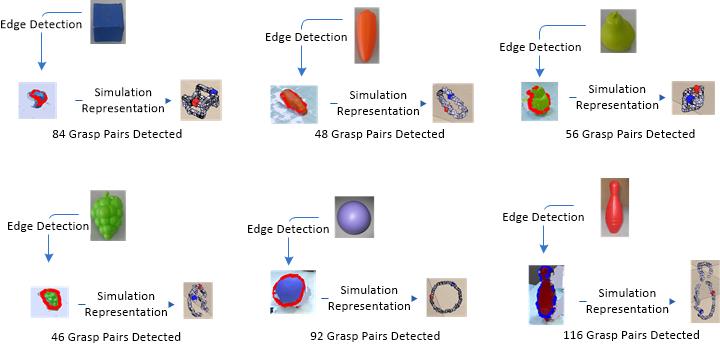
Learning Graspability of Unknown Objects via Intrinsic Motivation
Ercin Temel, Beata Joanna Grzyb and Sanem Sariel
The Second Workshop on Artificial Intelligence and Cognition (AIC), Torino, Italy, 2014, pp. 98-109
Ercin Temel, Beata Joanna Grzyb and Sanem Sariel
The Second Workshop on Artificial Intelligence and Cognition (AIC), Torino, Italy, 2014, pp. 98-109
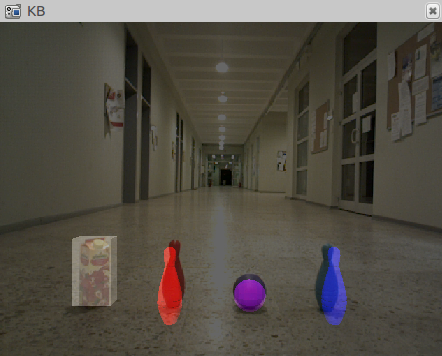
Scene Interpretation for Lifelong Robot Learning
Mustafa Ersen , Melodi Deniz Ozturk, Mehmet Biberci, Sanem Sariel and Hulya Yalcin
The 9th International Workshop on Cognitive Robotics (CogRob 2014) held in conjunction with ECAI-2014, Prague, Czech Republic, 2014
Mustafa Ersen , Melodi Deniz Ozturk, Mehmet Biberci, Sanem Sariel and Hulya Yalcin
The 9th International Workshop on Cognitive Robotics (CogRob 2014) held in conjunction with ECAI-2014, Prague, Czech Republic, 2014

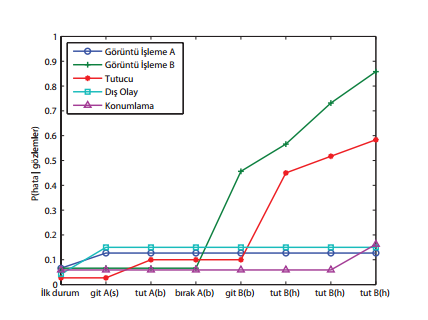
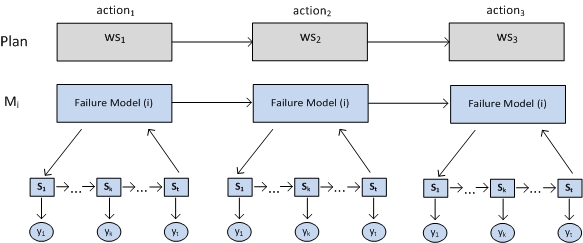
Probabilistic Failure Isolation for Cognitive Robots
Dogan Altan and Sanem Sariel-Talay
The 27th International FLAIRS Conference, Pensacola Beach, Florida, USA, 2014
Dogan Altan and Sanem Sariel-Talay
The 27th International FLAIRS Conference, Pensacola Beach, Florida, USA, 2014
World modeling for cognitive robots (in Turkish)
Melodi Deniz Ozturk, Mustafa Ersen , Mehmet Biberci, Sanem Sariel and Hulya Yalcin
22. IEEE Sinyal Isleme ve Iletisim Uygulamalari Kurultayi (SIU), Trabzon, Turkey, 2014
Melodi Deniz Ozturk, Mustafa Ersen , Mehmet Biberci, Sanem Sariel and Hulya Yalcin
22. IEEE Sinyal Isleme ve Iletisim Uygulamalari Kurultayi (SIU), Trabzon, Turkey, 2014
Action monitoring in cognitive robots (in Turkish)
Melis Kapotoglu, Cagatay Koc, and Sanem Sariel
22. IEEE Sinyal Isleme ve Iletisim Uygulamalari Kurultayi (SIU), Trabzon, Turkey, 2014
Melis Kapotoglu, Cagatay Koc, and Sanem Sariel
22. IEEE Sinyal Isleme ve Iletisim Uygulamalari Kurultayi (SIU), Trabzon, Turkey, 2014
Diagnosis of Action Execution Failures for Cognitive Robots (in Turkish)
Dogan Altan and Sanem Sariel
22. IEEE Sinyal Isleme ve Iletisim Uygulamalari Kurultayi (SIU), Trabzon, Turkey, 2014
Dogan Altan and Sanem Sariel
22. IEEE Sinyal Isleme ve Iletisim Uygulamalari Kurultayi (SIU), Trabzon, Turkey, 2014
Scene Interpretation for Self-Aware Cognitive Robots
Melodi Deniz Ozturk, Mustafa Ersen , Melis Kapotoglu, Cagatay Koc, Sanem Sariel-Talay, Hulya Yalcin
AAAI-14 Spring Symposium on Qualitative Representations for Robots, pp. 89-96, 2014
Melodi Deniz Ozturk, Mustafa Ersen , Melis Kapotoglu, Cagatay Koc, Sanem Sariel-Talay, Hulya Yalcin
AAAI-14 Spring Symposium on Qualitative Representations for Robots, pp. 89-96, 2014
Hierarchical HMM-based Failure Isolation for Cognitive Robots
Dogan Altan and Sanem Sariel-Talay
Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART), Position Paper, Angers, Loire Valley, France, 2014
Dogan Altan and Sanem Sariel-Talay
Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART), Position Paper, Angers, Loire Valley, France, 2014
Extracting Spatial Relations Among Objects for Failure Detection
Mustafa Ersen, Sanem Sariel-Talay and Hulya Yalcin
KI 2013 Workshop on Visual and Spatial Cognition, pp. 13-20, 2013
Mustafa Ersen, Sanem Sariel-Talay and Hulya Yalcin
KI 2013 Workshop on Visual and Spatial Cognition, pp. 13-20, 2013
Learning Guided Planning for Robust Task Execution in Cognitive Robotics
Sertac Karapinar and Sanem Sariel-Talay and Petek Yildiz and Mustafa Ersen
The AAAI-13 Workshop on Intelligent Robotic Systems, 2013
(Also presented at IEEE International Conference on Robotics and Automation (ICRA), Autonomous Learning Workshop, 2013)
Sertac Karapinar and Sanem Sariel-Talay and Petek Yildiz and Mustafa Ersen
The AAAI-13 Workshop on Intelligent Robotic Systems, 2013
(Also presented at IEEE International Conference on Robotics and Automation (ICRA), Autonomous Learning Workshop, 2013)
Experimental Learning in Cognitive Robots (in Turkish)
Sertac Karapinar, Mustafa Ersen , Melis Kapotoglu, Petek Yildiz, Sanem Sariel-Talay and Hulya Yalcin
21. IEEE Sinyal Isleme ve Iletisim Uygulamalari Kurultayi (SIU), Girne, KKTC, 2013
Sertac Karapinar, Mustafa Ersen , Melis Kapotoglu, Petek Yildiz, Sanem Sariel-Talay and Hulya Yalcin
21. IEEE Sinyal Isleme ve Iletisim Uygulamalari Kurultayi (SIU), Girne, KKTC, 2013

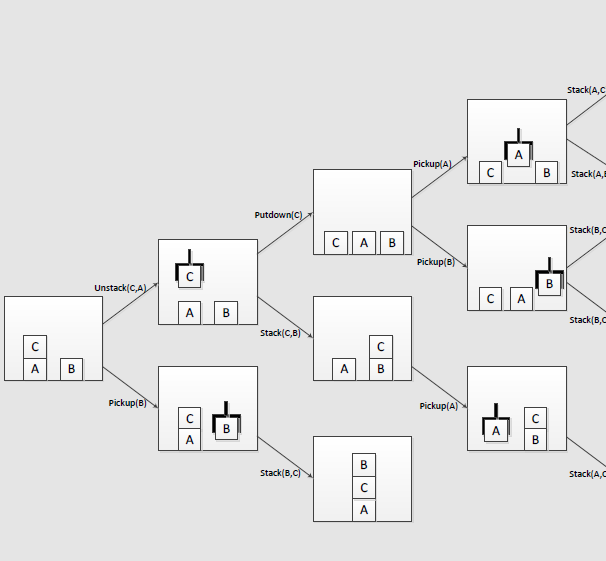
Robots That Create Alternative Plans against Failures
C. Ugur Usug, Dogan Altan and Sanem Sariel-Talay
The 10th IFAC Symposium on Robot Control (SYROCO), pp. 461-466, Dubrovnik, Croatia, September 5-7 2012
C. Ugur Usug, Dogan Altan and Sanem Sariel-Talay
The 10th IFAC Symposium on Robot Control (SYROCO), pp. 461-466, Dubrovnik, Croatia, September 5-7 2012
Learning Interactions Among Objects Through Spatio-Temporal Reasoning
Mustafa Ersen and Sanem Sariel-Talay
The AAAI-12 Workshop on Problem Solving Using Classical Planners, pp. 23-29, Toronto, Ontario, Canada, 2012
Mustafa Ersen and Sanem Sariel-Talay
The AAAI-12 Workshop on Problem Solving Using Classical Planners, pp. 23-29, Toronto, Ontario, Canada, 2012
A Robust Planning Framework for Cognitive Robots
Sertac Karapinar, Dogan Altan and Sanem Sariel-Talay
The AAAI-12 Workshop on Cognitive Robotics (CogRob), pp. 102-108, Toronto, Ontario, Canada, 2012
Sertac Karapinar, Dogan Altan and Sanem Sariel-Talay
The AAAI-12 Workshop on Cognitive Robotics (CogRob), pp. 102-108, Toronto, Ontario, Canada, 2012
Learning Interactions Among Objects, Tools and Machines for Planning
Mustafa Ersen and Sanem Sariel-Talay
The 17th IEEE Symposium on Computers and Communications (ISCC'12), pp. 361-366, Kapadokya, Nev?ehir, 2012
Mustafa Ersen and Sanem Sariel-Talay
The 17th IEEE Symposium on Computers and Communications (ISCC'12), pp. 361-366, Kapadokya, Nev?ehir, 2012
Uzam-zamansal Cikarsamayla Nesneler Arasi Etkilesimlerin Ogrenilmesi (in Turkish)
Mustafa Ersen and Sanem Sariel-Talay
20. IEEE Sinyal Isleme ve Iletisim Uygulamalari Kurultayi (SIU), Oludeniz, Fethiye, Mugla, 2012
Mustafa Ersen and Sanem Sariel-Talay
20. IEEE Sinyal Isleme ve Iletisim Uygulamalari Kurultayi (SIU), Oludeniz, Fethiye, Mugla, 2012
Distributed Team Formation for Humanoid Robot Soccer
Onuralp Ulusoy and Sanem Sariel-Talay
The 4th International Conference on Agents and Artificial Intelligence (ICAART), Vilamoura, Algarve, Portugal, 2012
Onuralp Ulusoy and Sanem Sariel-Talay
The 4th International Conference on Agents and Artificial Intelligence (ICAART), Vilamoura, Algarve, Portugal, 2012
An Integrated Planning and Learning Framework for Autonomous Mobile Robots
C. Ugur Usug, Dogan Altan, Sertac Karapinar, Mustafa Ersen and Sanem Sariel-Talay
The 5th International Conference on Cognitive Systems (CogSys), Vienna, Austria, 2012
C. Ugur Usug, Dogan Altan, Sertac Karapinar, Mustafa Ersen and Sanem Sariel-Talay
The 5th International Conference on Cognitive Systems (CogSys), Vienna, Austria, 2012
Dynamic Temporal Planning for Multirobot Systems
C. Ugur Usug and Sanem Sariel-Talay
The AAAI-11 Workshop on Automated Action Planning for Autonomous Mobile Robots (PAMR), 2011
C. Ugur Usug and Sanem Sariel-Talay
The AAAI-11 Workshop on Automated Action Planning for Autonomous Mobile Robots (PAMR), 2011
A Differential Steering System for Humanoid Robots
Shahriar Asta and Sanem Sariel-Talay
The 5th European Conference on Mobile Robots (ECMR), 2011
Shahriar Asta and Sanem Sariel-Talay
The 5th European Conference on Mobile Robots (ECMR), 2011
Nature-Inspired Optimization for Biped Robot Locomotion and Gait Planning
Shahriar Asta and Sanem Sariel-Talay
The 6th European Event on Nature-inspired Techniques in Scheduling, Planning and Timetabling, Torino, Italy, 2011, pp. 434-443
Shahriar Asta and Sanem Sariel-Talay
The 6th European Event on Nature-inspired Techniques in Scheduling, Planning and Timetabling, Torino, Italy, 2011, pp. 434-443

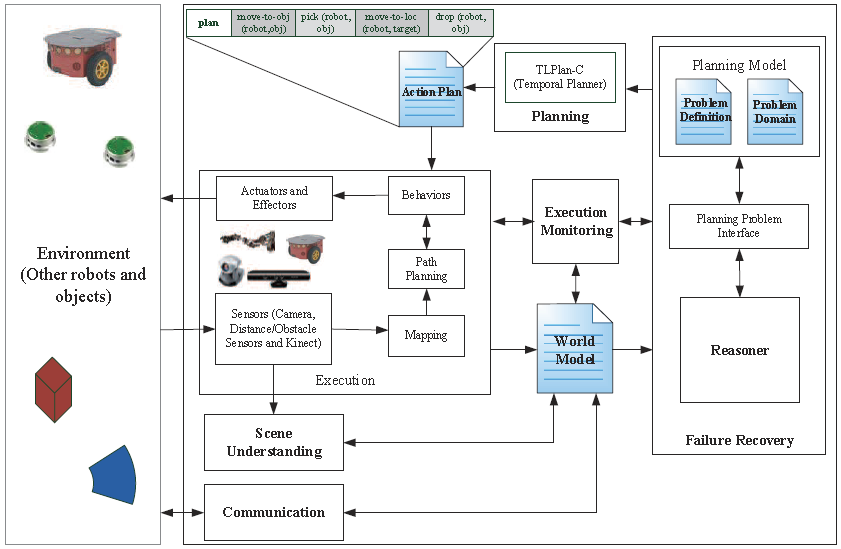
TLPlan-C: An Extended Temporal Planner for Modeling Continuous Change
Serdar Kecici and Sanem Sariel-Talay
The 20th International Conference on Automated Planning and Scheduling (ICAPS), Combining Action and Motion Planning Workshop, Toronto, Canada, 12-16 May, 2010, pp. 1-7
Serdar Kecici and Sanem Sariel-Talay
The 20th International Conference on Automated Planning and Scheduling (ICAPS), Combining Action and Motion Planning Workshop, Toronto, Canada, 12-16 May, 2010, pp. 1-7
Evaluation of RFID and Wireless Sensor Technologies for Local Search and Rescue Data Storage
Gurhan Avdan, Esin Ergen, Gursans Guven, Cagri Eroglu and Sanem Sariel-Talay
The International Symposium on Robotics and Intelligent Sensors (IRIS), Nagoya, Japan, 8-11 March, 2010, pp. 135-140
Gurhan Avdan, Esin Ergen, Gursans Guven, Cagri Eroglu and Sanem Sariel-Talay
The International Symposium on Robotics and Intelligent Sensors (IRIS), Nagoya, Japan, 8-11 March, 2010, pp. 135-140
Providing Local Information for Search and Rescue Using Sensor-Based Local Databases
Esin Ergen, Sanem Sariel-Talay, Gursans Guven
ASCE International Workshop on Computing in Civil Engineering, 2009, pp.43-52
Esin Ergen, Sanem Sariel-Talay, Gursans Guven
ASCE International Workshop on Computing in Civil Engineering, 2009, pp.43-52
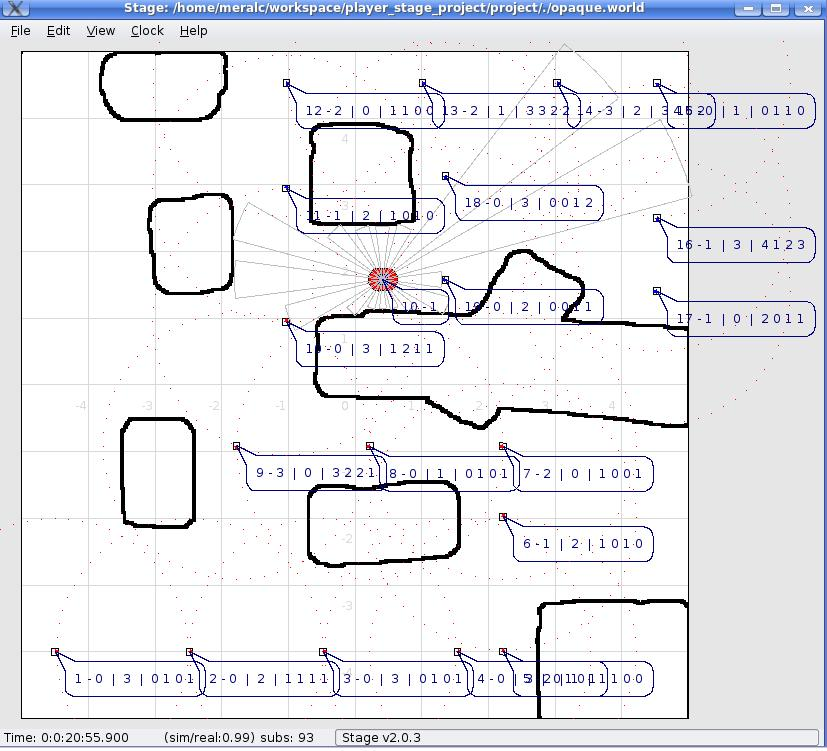
Utilizing Sensor-Based Robotic Terrain Coverage
Meral Camci and Sanem Sariel-Talay
International Workshop on Robotic Wireless Sensor Networks in The 5th IEEE International Conference on Distributed Computing in Sensor Systems (DCOSS), 2009
Meral Camci and Sanem Sariel-Talay
International Workshop on Robotic Wireless Sensor Networks in The 5th IEEE International Conference on Distributed Computing in Sensor Systems (DCOSS), 2009
Sensor-based Data Storage for Search and Rescue
Sanem Sariel-Talay, Esin Ergen, Gurhan Avdan and Cagri Eroglu
The Fourth International Conference on Intelligent Sensors, Sensor Networks and Information Processing (ISSNIP), 2008, pp. 7-12
Sanem Sariel-Talay, Esin Ergen, Gurhan Avdan and Cagri Eroglu
The Fourth International Conference on Intelligent Sensors, Sensor Networks and Information Processing (ISSNIP), 2008, pp. 7-12
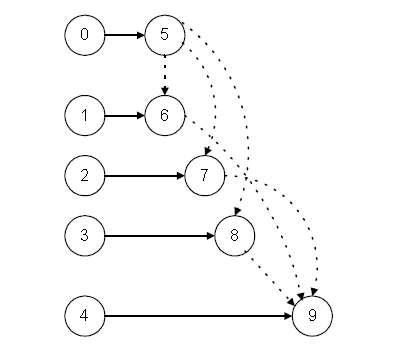
Incremental Multi-Robot Task Selection for Resource Constrained and Interrelated Tasks
Sanem Sariel, Tucker Balch and Nadia Erdogan
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2007, pp. 2314-2319
Sanem Sariel, Tucker Balch and Nadia Erdogan
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2007, pp. 2314-2319

An Integrated Approach To Solving the Real-World Multiple Traveling Robot Problem
Sanem Sariel, Nadia Erdogan and Tucker Balch
The 5th International Conference on Electrical and Electronics Engineering (ELECO), 2007, pp.381-385
Sanem Sariel, Nadia Erdogan and Tucker Balch
The 5th International Conference on Electrical and Electronics Engineering (ELECO), 2007, pp.381-385

Dynamic and Distributed Allocation of Resource Constrained Project Tasks to Robots
Sanem Sariel and Tucker Balch
Multi-Agent Robotic Systems (MARS) Workshop at the Third International Conference on Informatics in Control, Automation and Robotics, 2006, pp. 34-43
(Also presented at the AAAI Workshop on Auction Mechanisms for Robot Coordination, 2006)
Sanem Sariel and Tucker Balch
Multi-Agent Robotic Systems (MARS) Workshop at the Third International Conference on Informatics in Control, Automation and Robotics, 2006, pp. 34-43
(Also presented at the AAAI Workshop on Auction Mechanisms for Robot Coordination, 2006)

Robust Multi-Robot Cooperation Through Dynamic Task Allocation and Precaution Routines
Sanem Sariel and Tucker Balch
The 3rd International Conference on Informatics in Control, Automation and Robotics (ICINCO), 2006, pp. 196-201
(An earlier version of this paper appeared as a Tech Report: Robust Multi-Robot Coordination in Noisy and Dangerous Environments, GVU Tech Report GIT-GVU-05-17, 2005)
Sanem Sariel and Tucker Balch
The 3rd International Conference on Informatics in Control, Automation and Robotics (ICINCO), 2006, pp. 196-201
(An earlier version of this paper appeared as a Tech Report: Robust Multi-Robot Coordination in Noisy and Dangerous Environments, GVU Tech Report GIT-GVU-05-17, 2005)

Efficient Bids on Task Allocation for Multi Robot Exploration
Sanem Sariel and Tucker Balch
The 19th International Florida Artificial Intelligence Research Society (FLAIRS) Conference, 2006, pp. 116-121
Sanem Sariel and Tucker Balch
The 19th International Florida Artificial Intelligence Research Society (FLAIRS) Conference, 2006, pp. 116-121

Real Time Auction Based Allocation of Tasks for Multi-Robot Exploration Problem in Dynamic Environments
Sanem Sariel and Tucker Balch
Integrating Planning into Scheduling: Papers from the 2005 AAAI Workshop, ed. Mark Boddy, Amedeo Cesta, and Stephen F. Smith, pp.27-33. Technical Report WS-05-06. American Association for Artificial Intelligence (AAAI), 2005
Sanem Sariel and Tucker Balch
Integrating Planning into Scheduling: Papers from the 2005 AAAI Workshop, ed. Mark Boddy, Amedeo Cesta, and Stephen F. Smith, pp.27-33. Technical Report WS-05-06. American Association for Artificial Intelligence (AAAI), 2005
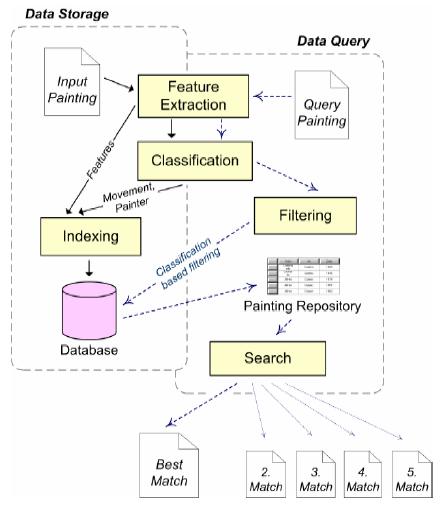
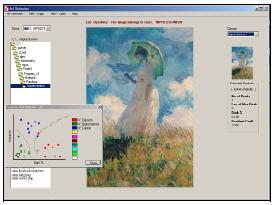
Content Based Access to Art Paintings
Bilge Gunsel , Sanem Sariel, Oguz Icoglu
The 12th IEEE International Conference on Image Processing (ICIP), 2005, pp. 558-561
Bilge Gunsel , Sanem Sariel, Oguz Icoglu
The 12th IEEE International Conference on Image Processing (ICIP), 2005, pp. 558-561
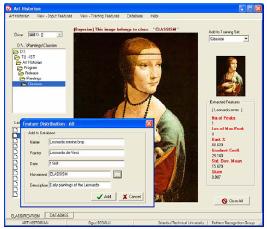
ARTHISTORIAN: An Integrated Indexing and Personalized Browsing System for Art Paintings
Oguz Icoglu, Bilge Gunsel , Sanem Sariel
The Fourth International Workshop on Content-Based Multimedia Indexing, 2005
Oguz Icoglu, Bilge Gunsel , Sanem Sariel
The Fourth International Workshop on Content-Based Multimedia Indexing, 2005
Classification and Indexing Of Paintings Based On Art Movements
Oguz Icoglu, Bilge Gunsel , Sanem Sariel
The 12th European Signal Processing Conference (Eusipco), September 6-10 2004, Vienna Austria, pp. 749-752
Oguz Icoglu, Bilge Gunsel , Sanem Sariel
The 12th European Signal Processing Conference (Eusipco), September 6-10 2004, Vienna Austria, pp. 749-752
An Adaptive Mutation Scheme in Genetic Algorithms for Fastening the Convergence to the Optimum
Sima Uyar, Gulsen Eryigit and Sanem Sariel
The Third Asia Pacific International Symposium on Information Technology, 2004, pp. 461-465
Sima Uyar, Gulsen Eryigit and Sanem Sariel
The Third Asia Pacific International Symposium on Information Technology, 2004, pp. 461-465
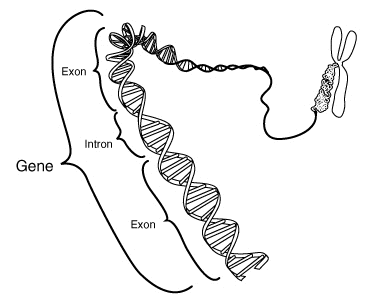
Image courtesy: Wikipedia
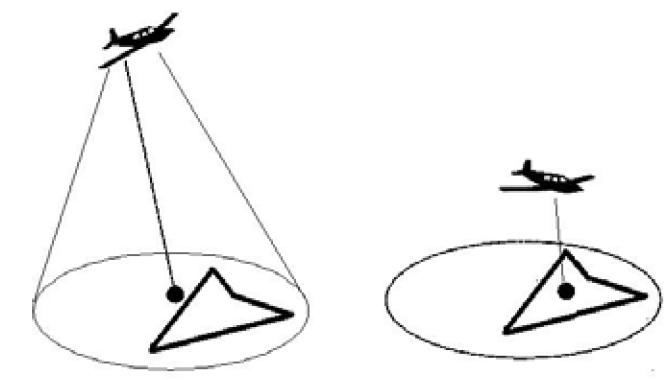
A Hybrid Planning Approach for Robots in Search and Rescue
Sanem Sariel
The Third Asia Pacific International Symposium on Information Technology 2004, pp. 502-508
Sanem Sariel
The Third Asia Pacific International Symposium on Information Technology 2004, pp. 502-508
Ozerk Robotlar icin Bir Genis Alan Taramasi Planlama Yontemi (in Turkish) - "A Wide Area Coverage Planning Strategy for Autonomous Robots"
Sanem Sariel and H. Levent Akin
Havacilikta Ileri Teknolojiler ve Uygulamalari Sempozyumu 2004, sf. 491-496
Sanem Sariel and H. Levent Akin
Havacilikta Ileri Teknolojiler ve Uygulamalari Sempozyumu 2004, sf. 491-496
Intelligent Agents Serving Based on the Society Information
Sanem Sariel and B. Tevfik Akgun
The Eighth IEEE Symposium on Computers and Communications (ISCC) 2003, pp. 763-768
Sanem Sariel and B. Tevfik Akgun
The Eighth IEEE Symposium on Computers and Communications (ISCC) 2003, pp. 763-768
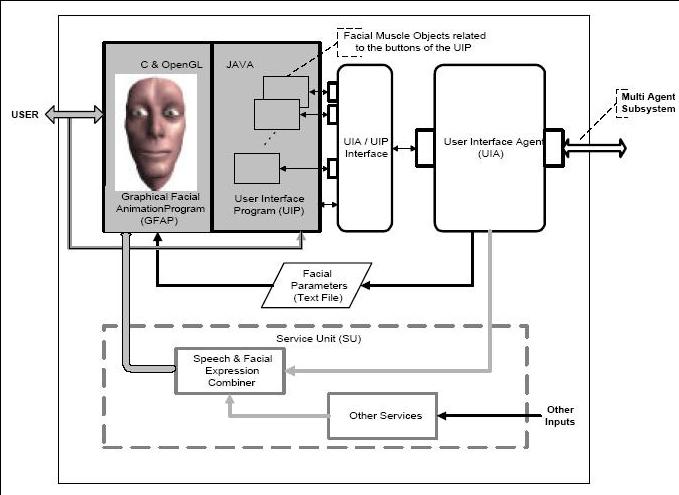
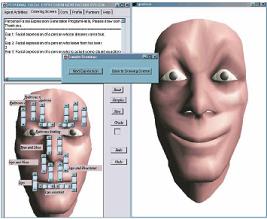
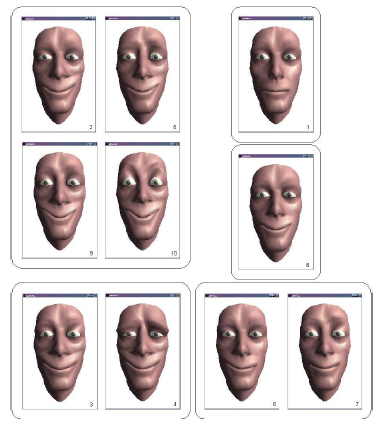
A Personal Facial Expression Generation System with Interacting Agents
Sanem Sariel and B. Tevfik Akgun
First Conference on Technologies for Interactive Digital Story Telling and Entertainment(TIDSE) Proceedings, Computer Graphik Ed 2003 pp. 82-93
Sanem Sariel and B. Tevfik Akgun
First Conference on Technologies for Interactive Digital Story Telling and Entertainment(TIDSE) Proceedings, Computer Graphik Ed 2003 pp. 82-93
A Multi Agent System Analyzing Parameters Related to Facial Expressions
Sanem Sariel and B. Tevfik Akgun
The IASTED International Conference on Applied Informatics, International Symposium on Artificial Intelligence and Applications, February 18-21, Innsbruck Austria, 2002, pp. 302-307
Sanem Sariel and B. Tevfik Akgun
The IASTED International Conference on Applied Informatics, International Symposium on Artificial Intelligence and Applications, February 18-21, Innsbruck Austria, 2002, pp. 302-307
Saglik Sistemlerinde Akilli Kart Uygulamalari (in Turkish) - "Smart Card Applications on Healthcare Systems"
Cicek Cavdar, Sanem Sariel, B. Tevfik Akgun
Bilisim 2000 Kurultayi
Cicek Cavdar, Sanem Sariel, B. Tevfik Akgun
Bilisim 2000 Kurultayi
Image courtesy: www.sreego.com
Technical Reports
Reports of the AAAI 2011 Conference Workshops
Noa Agmon, Vikas Agrawal, David W. Aha, Yiannis Aloimonos, Donagh Buckley, Prashant Doshi, Christopher Geib, Floriana Grasso, Nancy Green, Benjamin Johnston, Burt Kaliski, Christopher Kiekintveld, Edith Law, Henry Lieberman, Ole J. Mengshoel, Ted Metzler, Joseph Modayil, Douglas W. Oard, Nilufer Onder, Barry O Sullivan, Katerina Pastra, Doina Precup, Sowmya Ramachandran, Chris Reed, Sanem Sariel-Talay, Ted Selker, Lokendra Shastri, Satinder Singh, Stephen F. Smith, Siddharth Srivastava, Gita Sukthankar, David C. Uthus, Mary-Anne Williams
AI Magazine, 2012
Noa Agmon, Vikas Agrawal, David W. Aha, Yiannis Aloimonos, Donagh Buckley, Prashant Doshi, Christopher Geib, Floriana Grasso, Nancy Green, Benjamin Johnston, Burt Kaliski, Christopher Kiekintveld, Edith Law, Henry Lieberman, Ole J. Mengshoel, Ted Metzler, Joseph Modayil, Douglas W. Oard, Nilufer Onder, Barry O Sullivan, Katerina Pastra, Doina Precup, Sowmya Ramachandran, Chris Reed, Sanem Sariel-Talay, Ted Selker, Lokendra Shastri, Satinder Singh, Stephen F. Smith, Siddharth Srivastava, Gita Sukthankar, David C. Uthus, Mary-Anne Williams
AI Magazine, 2012

Image courtesy: AI Magazine
Distributed Multi-AUV Coordination in Naval Mine Countermeasure Missions
Sanem Sariel, Tucker Balch and Jason Stack
GVU Tech Report GIT-GVU-06-04, 2006
Sanem Sariel, Tucker Balch and Jason Stack
GVU Tech Report GIT-GVU-06-04, 2006
Robust Multi-Robot Coordination in Noisy and Dangerous Environments
Sanem Sariel and Tucker Balch
GVU Tech Report GIT-GVU-05-17, 2005
Sanem Sariel and Tucker Balch
GVU Tech Report GIT-GVU-05-17, 2005
Theses
A Multi Agent System Application Analyzing Facial Expressions With User Profiles (in Turkish)
Advisor: B. Tevfik Akgun
M.Sc. Thesis, February 2002, Istanbul Technical University, Institute of Science and Technology
Advisor: B. Tevfik Akgun
M.Sc. Thesis, February 2002, Istanbul Technical University, Institute of Science and Technology
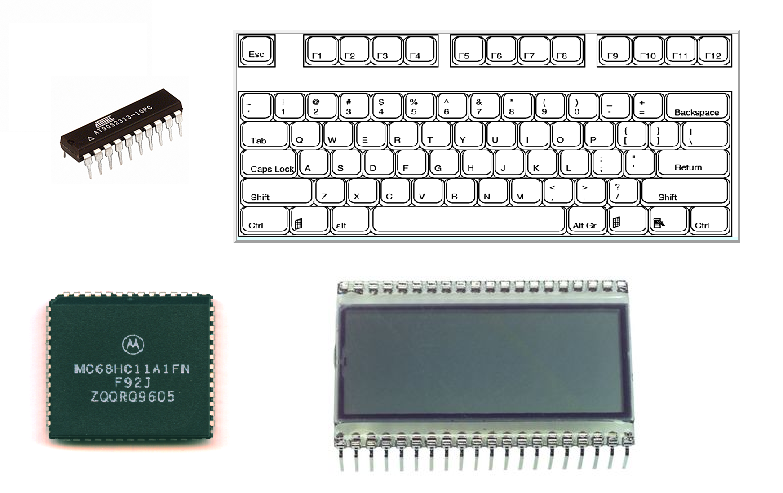
Keyboard PC-controller implementation by designing a system consisting of a keyboard and micro-controllers (ATMEL AT90S2313, Motorola 68HC11)(in Turkish)
Advisor: B. Tevfik Akgun
B.Sc. Project, Istanbul Technical University, June 1999, Control and Computer Engineering Department
Advisor: B. Tevfik Akgun
B.Sc. Project, Istanbul Technical University, June 1999, Control and Computer Engineering Department
Other Publications
Failure Handling in a Planning Framework
Sertac Karapinar and Sanem Sariel-Talay
The Twenty-Sixth AAAI Conference on Artificial Intelligence, Student Workshop, Toronto, Ontario, Canada, 2012
Sertac Karapinar and Sanem Sariel-Talay
The Twenty-Sixth AAAI Conference on Artificial Intelligence, Student Workshop, Toronto, Ontario, Canada, 2012
beeStanbul Team Description Paper - 2012
Baris Demirdelen, Berkay Toku, Onuralp Ulusoy, Tuna Sonmez, Kubra Ayvaz, Elif Senyurek and Sanem Sariel-Talay
RoboCup, Mexico City, Mexico, June 18-24, 2012
Baris Demirdelen, Berkay Toku, Onuralp Ulusoy, Tuna Sonmez, Kubra Ayvaz, Elif Senyurek and Sanem Sariel-Talay
RoboCup, Mexico City, Mexico, June 18-24, 2012
beeStanbul Team Description Paper - 2011
Shahriar Asta, Tuna Sonmez, Onuralp Ulusoy, Alper Alimoglu, Mustafa Ersen , Ozdemir Sozmen and Sanem Sariel-Talay
RoboCup, Istanbul, Turkey, 5-11, July 2011
Shahriar Asta, Tuna Sonmez, Onuralp Ulusoy, Alper Alimoglu, Mustafa Ersen , Ozdemir Sozmen and Sanem Sariel-Talay
RoboCup, Istanbul, Turkey, 5-11, July 2011
Temporal Planning for Interacting Durative Actions with Continuous Effects
Serdar Kecici and Sanem Sariel-Talay
The Twenty-Fourth AAAI Conference on Artificial Intelligence, Student Workshop, Atlanta, Georgia, USA, 2010
Serdar Kecici and Sanem Sariel-Talay
The Twenty-Fourth AAAI Conference on Artificial Intelligence, Student Workshop, Atlanta, Georgia, USA, 2010
beeStanbul Team Description Paper - 2010
Bahadir Acar, Shahriar Asta, Sukru Avcuoglu, Maltam H. Sarabi, Itauma Itauma, Zehra Kavasoglu, Can Oztokmak, Ozdemir Sozmen, Nurdan Topaloglu and Sanem Sariel-Talay
RoboCup, Singapore 19-25 June 2010
Bahadir Acar, Shahriar Asta, Sukru Avcuoglu, Maltam H. Sarabi, Itauma Itauma, Zehra Kavasoglu, Can Oztokmak, Ozdemir Sozmen, Nurdan Topaloglu and Sanem Sariel-Talay
RoboCup, Singapore 19-25 June 2010

A Framework for Multi-Robot Coordination
Sanem Sariel (Advisors: Tucker Balch and Nadia Erdogan)
The International Conference on Automated Planning & Scheduling (ICAPS), Doctoral Consortium, 2005
Sanem Sariel (Advisors: Tucker Balch and Nadia Erdogan)
The International Conference on Automated Planning & Scheduling (ICAPS), Doctoral Consortium, 2005