

Mehmet Hasanzade
Research Assistant @ Istanbul Technical University & Senior Research Engineer @ ITU-Aerospace Research Center
About Me
Research Assistant @ Istanbul Technical University & Senior Research Engineer @ ITU-Aerospace Research Center
About Me

I am a Research and Teaching Assistant at Istanbul Technical University (ITU) and Senior Research Engineer at Istanbul Technical University Aerospace Research Center (ITU ARC).
Ph.D. candidate - Aerospace Engineering, currently, ITU
M.Sc. - Automation and Control Engineering, 2016, ITU
B.Sc. - Telecommunication Engineering, 2014, ITU
My research interests includes hardware and software implementation of agile unmanned aerial vehicles, flight trajectory optimization and replanning, airborne conflict avoidance, visual-based navigation and sensor fusion.
Email: hasanzade.mehmet @gmail.com
Phone: +90 535 867 2449
Location: Istanbul, Turkey
The most challenging study nowadays is to guide and navigate the lightweight unmanned aerial vehicle in an unknown environment. To overcome this challenge, as a part of my Ph.D. work, I have developed a novel deep reinforcement learning-based collision avoidance method. Before the flight, system generates a simple straight B-spline curve and use differential flatness outputs to represent the trajectory. For collision situations, the B-spline knot insertion method to add another control point which is used by deep reinforcement learning agents to generate a new location for collision avoidance. I build a simulation platform for validation, the re-planning takes less than 1.2ms in a cluttered environment.[2](Journal of Intelligent & Robotic Systems)
Video footage was taken from the camera mounted on a UAV. In the video footage, you can see two other UAVs flying with. The aim of the project is to perform coverage path planning and loiter operations with multiple UAVs. I designed centralized communication system and command and control system for coverage path planning application.
The aim of this project is to enable an unmanned aerial vehicle (UAV) to hit the target with a target tracking and guidance algorithm. From this, I designed a guidance algorithm which utilize gimbal system with an image processing algorithm to find and track the target and decide the guidance vector. In the video, the first prototype flight is performed with 2m/s and 5m/s guindance speed.
In this project, we designed software in the loop system in Matlab where you can fly multiple UAVs. I designed two different solution for RF emitting target localization using extended kalman filter (EKF) and particle filter (PF) which is also explained in Localization Methods Video. Also, My collegue and I designed centralized guidance and control ground station to control UAVs. We performed software-in-the-loop tests and outdoor tests which can be seen in the video [3].
This video shows the simulations for RF emitting target localization solutions. I utilized a localization and tracking architecture, where a data driven neural network model is used for estimating the unknown signal strength and used Extended Kalman Filter for eliminating the RSS noise and increase the precision of target tracking performance. This solution is performed by using three UAVs and the simulation results in a 10 × 10 km2 search area. In second solution, I designed a Particle Filter based method that allows to localize the RF emitting target by using only one UAV. Both solutions are published in [4], [5].
This video shows a test flight created from coordinated flight studies. Our aim was to have multiple UAVs follow the leader UAV. This is accomplished by trying to preserve the predetermined geometric shape formed by UAVs. For this study, I designed the formation flight controller which is based on follow-the-leader concept which can be seen in video.
I designed the intertial navigation system to perform common autopilot missions. In this video, click and go feature tests are performed in order to see both the autopilot and the intertial navigation system performances. In the INS, low-pass filter, offset abstraction, complimentary filter, and kalman filter are utilized to calculate meaningfull and highly accurate state outputs.
In this video, we demonstrate mission test to also show to performance of the waypoint tracker via designed autopilot system and inertial navigation system.

The aim of this project is to provide the design and production of vertical take-off and landing unmanned aerial vehicle called TURAC. Within the scope of this project, I was responsible for the telemetry system and I also gained experience in avionics, control, INS and flight tests during the project phase.
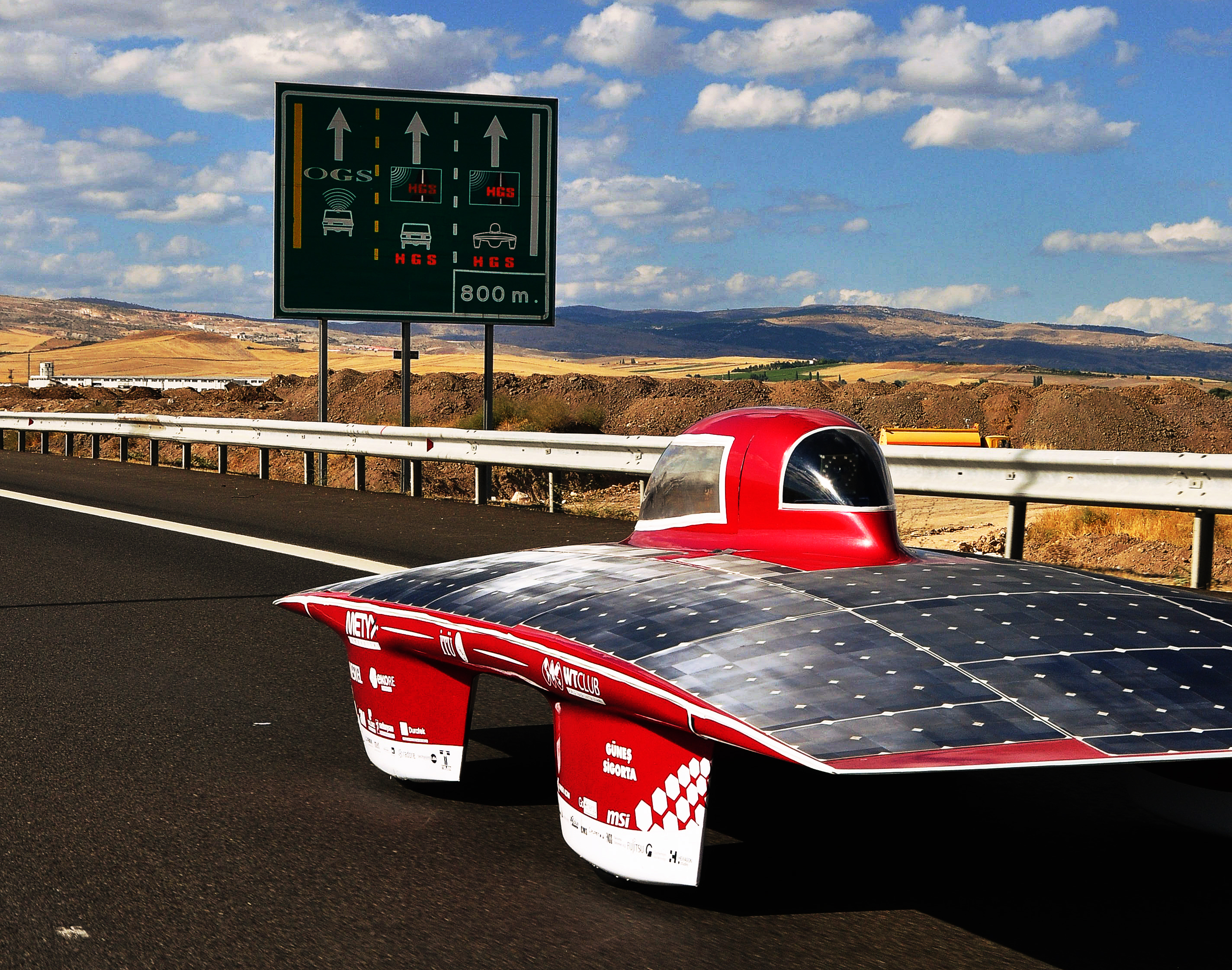
I joined the ITU solar car team in 2011. The aim of this team is to demonstrate the benefits and future of the use of sustainable energy technologies in vehicles. Between 2011 and 2013, I took charge of embedded hardware design in solar car team. I designed the battery management system of Arıba5 and Solar management system, vehicle management system, steering circuit and telemetry system of Arıba6. During this period, we won the 3rd place and the best design award in the 2012 Tubitak Formula-G race. In 2013, we completed the World Solar Challenge competition, which was held in Australia with participation from all over the world.
Floradem started in 2014, offers a more efficient disinfection system for use in agricultural fields. Due to the excessive use of drugs, the disinfection systems currently used cause harm to the user financially, the fruits and vegetables produced deteriorate and again cause the poisoning of the soil. To make this use more convenient, Floradem offers an electrostatic disinfection system. While the spraying system provides more efficient spraying with electrostatic charging, ultrasonic sensors detect the gaps between trees and stop spraying.
We pitched our idea in the ITU-Seed which is now ranked 2nd in Europe and 3rd in the world in UBI Global's ranking of "University-affiliated Incubation Centers". In this presentation, which also appears in the video, we won 25.000TL and 1 year office located in ITU-ARI Technokent. During this period, I participated in KOSGEB applied entrepreneurship training and ITU-Core applied entrepreneurship trainings.
1. Avoinics Technology Evolution
2. Avionics: Communication
3. Ground-based Navigation Aids
4. Space-based Navigation Systems
5. Intro. to Aerodynamics
6. Intro. to Stability and Control
7. Feedback Control Systems
8. Sensors in Aerospace
9. Sensor Fusion Techniques
10. Project: Design hardware with Arduino, GPS, and IMU
11. Project: Design hardware with Arduino, GPS, and IMU (cont'd)
12. Project: Design software of Inertial Navigation System
13. Project: Design software of Inertial Navigation System
14. Field Test: Project Presentation
1. Introduction to Computers, the Internet and the Web
2. Introduction to C Programming
3. Structured Program Development in C
4. C Program Control
5. C Functions
6. C Arrays
7. C Pointers
8. C Characters and Strings
9. C Formatted I/0
10. C Structures, Unions, Bit Manipulations and Enumerations
11. C File Processing
12. C Data Structures
13. C Preprocessor
14. Other C topics
1. Meeting and Introduction
2. An Overview of MATLAB
3. Numeric, Cell, and Structure Arrays
4. Functions and Files
5. Programming with MATLAB
6. Advanced Plotting
7. Model building and Regression
8. Statistics, PRobability, and Interpolation
9. Linear Algebraic Equations
10. Numerical Methods for Calculus and Differential Equations
11. Simulink
12. Simulink (cont'd)
13. Code generation for Embedded Target
14. Aerospace Toolbox and Others
C, C++, C#, Python, Matlab/Simulink
ST Uc family, Arduino, Raspberry-pi, Nvidia Jetson TX2, Pixhawk

Best Presentation Award - International Conference on Mechanical and Aerospace Engineering (ICMAE)
Best Presentation Award - Integrated Communications, Navigation and Surveillance Conference (ICNS)

Tubitak Formula-G - Solar Car Race 3rd Place
Tubitak Formula-G - Best Design Award

ITU-Seed - BigBang Start-up Challenge 3rd Place (Floradem)
ITU-Seed - Applied Entrepreneurship Programme
KOSEB - Applied Entrepreneurship Education
You can download my CV to see my brief experiences. If you want to check in more detail, you can review the project videos, images and project details in Projects section. If you are interested, please contact me by e-mail.
ITU Aerospace Research Center, Istanbul, Turkey
+90 535 867 2449
hasanzade.mehmet@gmail.com