AI-Driven Detection of Network Traffic Anomalies
CompletedA comprehensive study on detecting DDoS attacks using machine learning techniques in the OMNeT++ simulation environment. The project analyzes network traffic features including packet size, ports, and transmission frequency. Using various ML models (Logistic Regression, Decision Trees, MLP, Random Forest), achieved 94% accuracy and 0.927 ROC-AUC score with Random Forest, demonstrating effective identification of network anomalies.
Road Line Detection
CompletedImplementation of a road line detection system using computer vision techniques. The project processes video input to identify and highlight lane lines, essential for autonomous driving applications.
Advanced Lane Detection
CompletedA sophisticated computer vision pipeline for robust lane detection in challenging driving conditions. Features camera calibration, perspective transform, color/gradient thresholding, and polynomial fitting for accurate lane boundary detection.
GPS Publisher for ROS2 Humble
CompletedThis ROS2 package simulates real-time GPS and IMU data streams by publishing NavSatFix, Imu, and PoseWithCovarianceStamped messages. Perfect for testing autonomous systems without hardware.
Self-Driving Cars Specialization
CompletedUnderstanding commonly used hardware for self-driving cars, identifying the main components of the self-driving software stack, programming vehicle modeling and control.
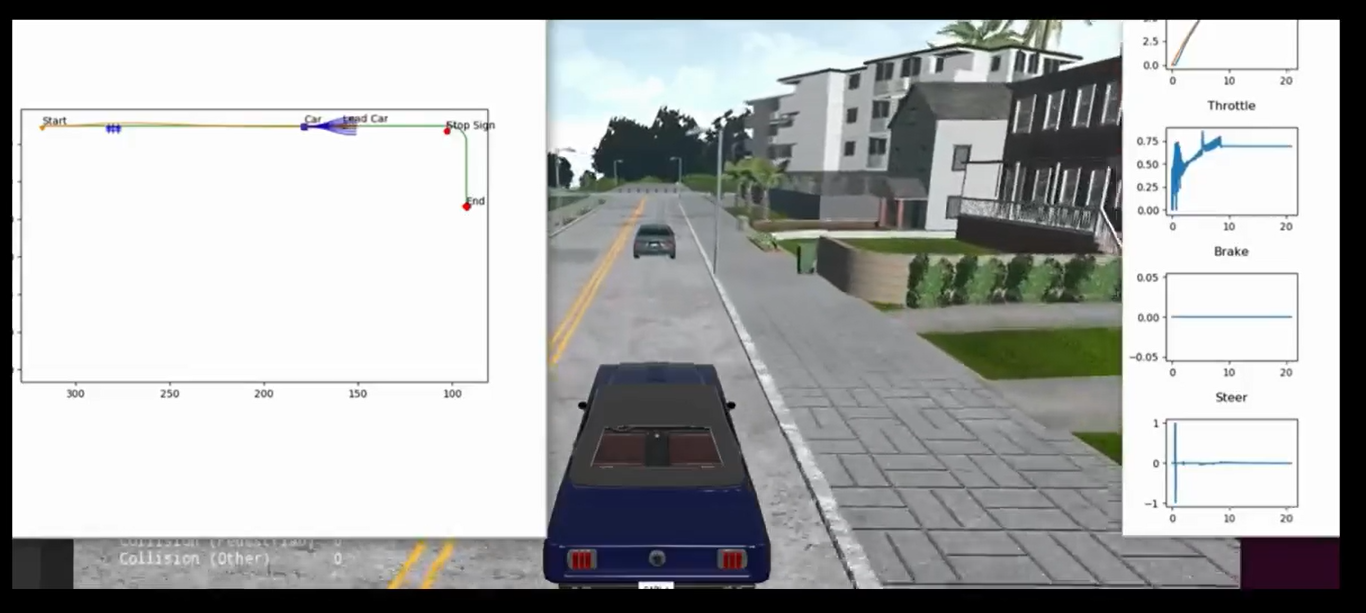
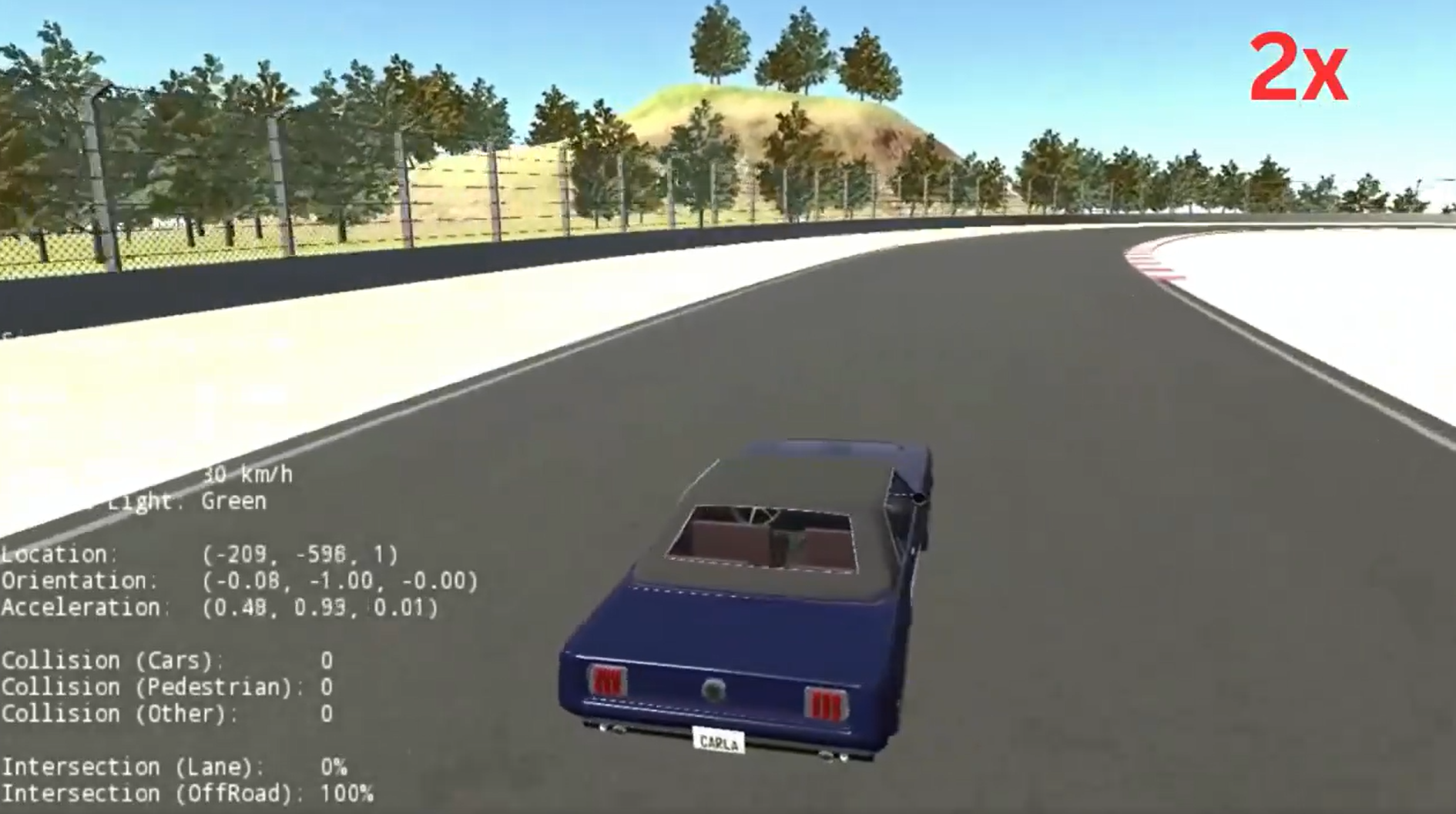
Motion Planning Simulation
CompletedImplementation of three critical phases of autonomous driving planning: Short-Term, Immediate-Term, and Behavior Planning, focusing on obstacle avoidance and traffic rules.
Urban Noise Classification
CompletedClassification of urban noise using various machine learning models including DNN, CNN, LSTM, and Random Forest using the UrbanSound8K dataset.

Image Stitching in Real-Time During Video Capturing
CompletedDeveloped a real-time image stitching system optimized for low to mid-range smartphones that processes video frames during the recording process to create seamless panoramic images. The project leverages efficient feature detection, matching, and homography estimation techniques for accurate stitching while maintaining smooth performance on mobile devices with limited computational resources.
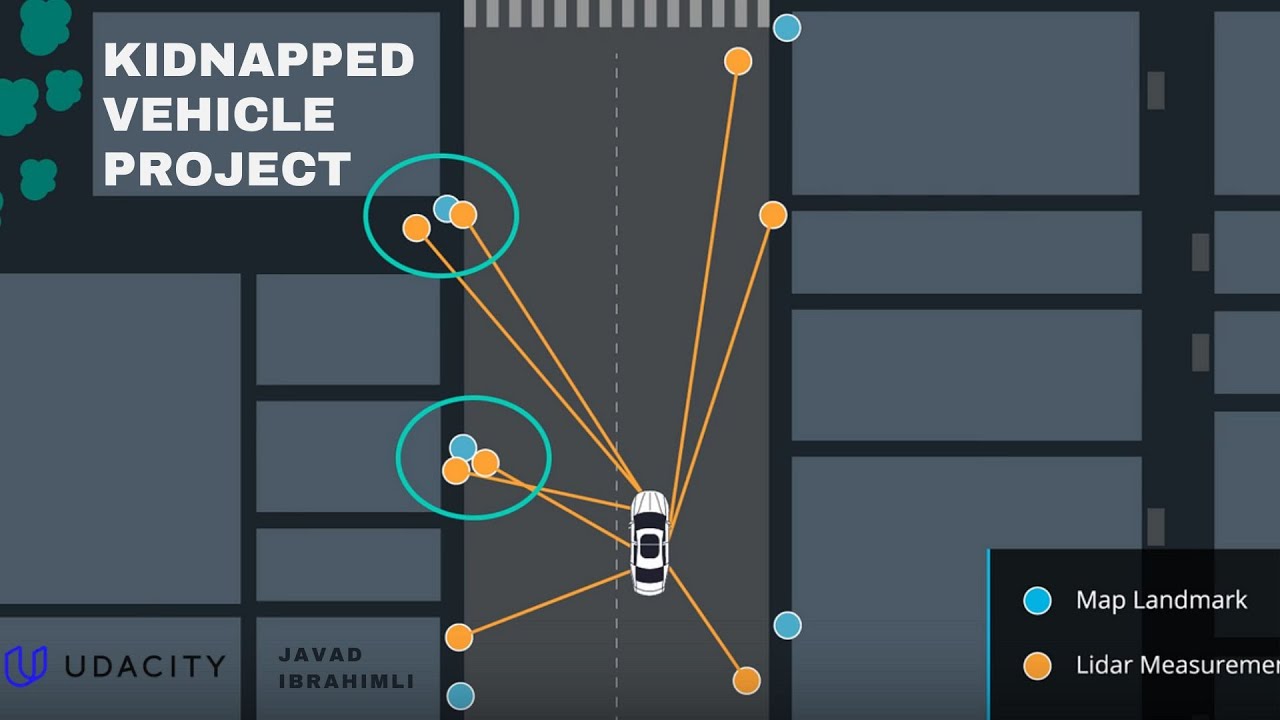
Particle Filter Localization
CompletedImplementation of a 2D particle filter to solve the "kidnapped car" problem for vehicle localization. The algorithm predicts positions, matches sensor data to landmarks, updates weights with Gaussian distributions, and resamples particles for accurate vehicle tracking.
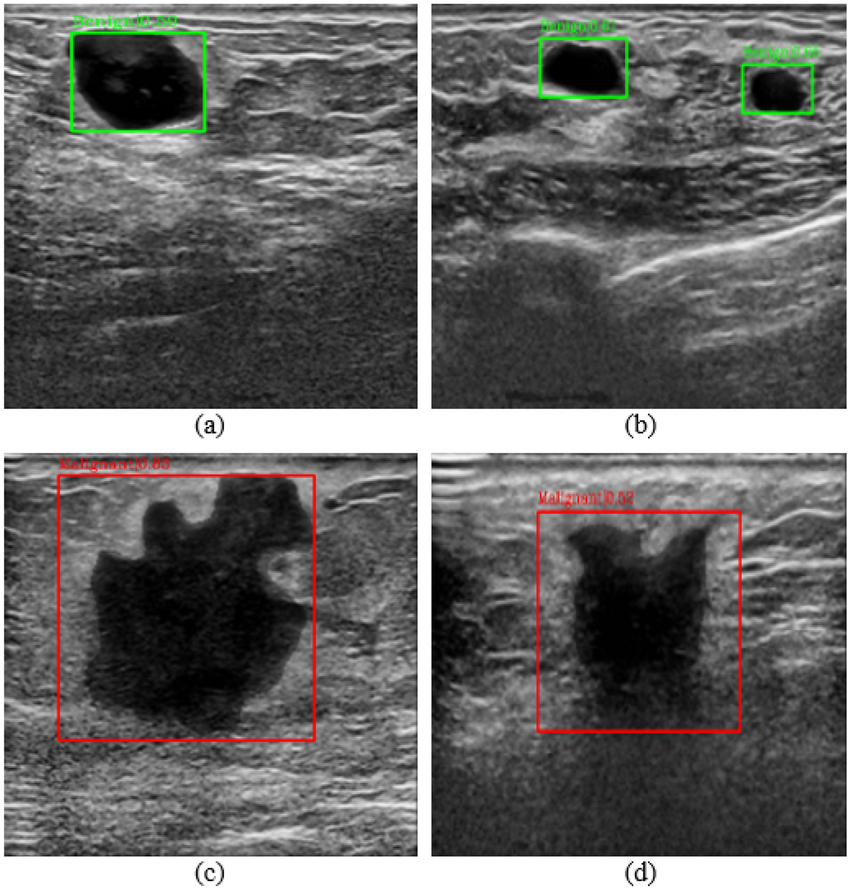
Early Detection of Breast Cancer using AI with Ultrasound Analysis
OngoingAn innovative project utilizing artificial intelligence to analyze ultrasound images for early detection of breast cancer. The system aims to improve diagnostic accuracy and reduce false positives through advanced machine learning algorithms and image processing techniques.