My research focuses on developing smart robotic systems having soft and flexible structures by embedding unique sensor and actuator components using novel techniques and develop advanced control strategies for specific application needs.
Projects
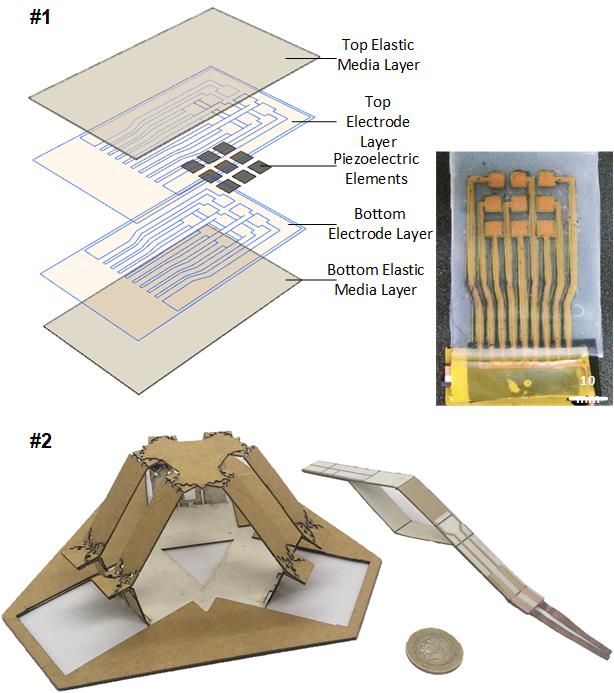
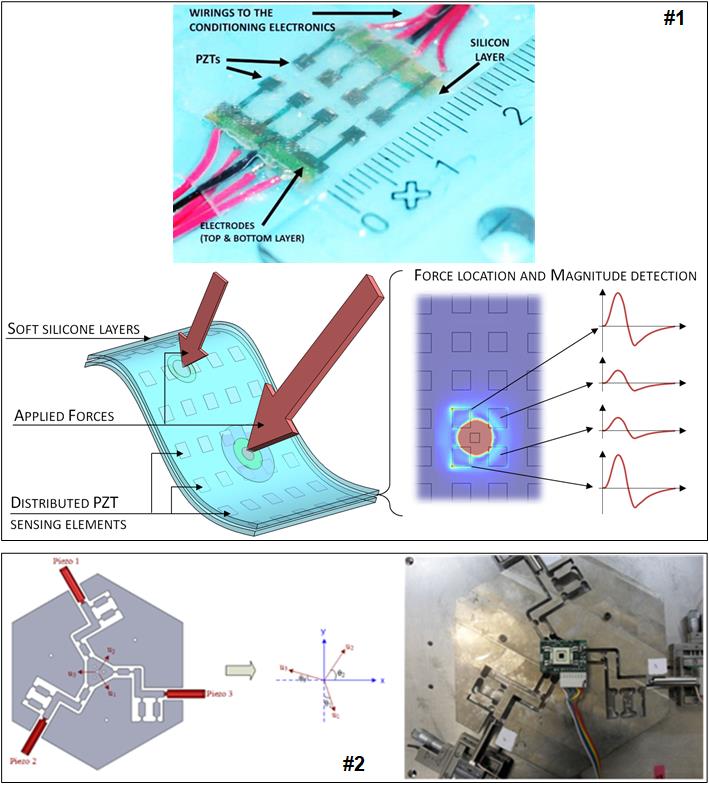
#1 Tactile System Design for Texture Recognition and Realization
The purpose of this project is to design, manufacture and cooperate the tactile sensor and the tactile actuator.
In this project, a piezoelectric (PZT) based, having 3x3 matrix form, flexible, low profile tactile sensor and a tactile actuator
having 9 magnetic pins have been developed. The mechatronic integration of the designs have been achieved and a new tactile system has
been established. The references for controlling the tactile actuator have been provided by sensing the force localization and surface
geometries with the tactile sensor. This project is supported by Tubitak 3501.( Acer M.& Yıldız F., Access 2022, Acer M.,Yıldız F.&Bazzaz H., ICAT 2017)
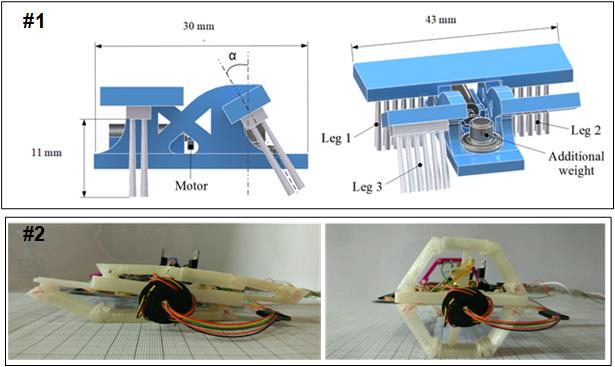
#2 Design and Manufacturing of Novel Systems for Miniature Parallel Robots
The goal of this project is to design and manufacture miniature, scalable, portable parallel robots with closed loop feedback control
algorithm using embedded position sensors. This project aims to build new generation robotic systems which are novel, national,
commercialazable, low-cost, scalable and adaptable and providing high precision micro positioning. This project is supported by Tubitak 1003.( Acer Kalafat M., Sevinç H., Samankan S., Altınkaynak A. & Temel Z., J. Mechanisms Robotics)
#3 Wearable Lower Body Exoskeleton System with Flexible Clothing
In this project, a novel wearable exoskeleton with flexible clothing will be developed for the use
of paraplegic persons who have lost their lower extremity motor functions due to low back pain, paralysis and similar disturbances.
This prototype will be designed as a rigid-link exoskeleton that is actuated via series-elastic actuators.
The user’s physical state will be observed using soft elements attached to a wearable sensorized clothing,
which will be used in conjunction with the exoskeleton. This project is supported by Tubitak 1003. (Uğurlu B. et al. ICORR 2019)