






Yerli İmkânlar ile Geliştirilen
DA Servo Sürücü ve
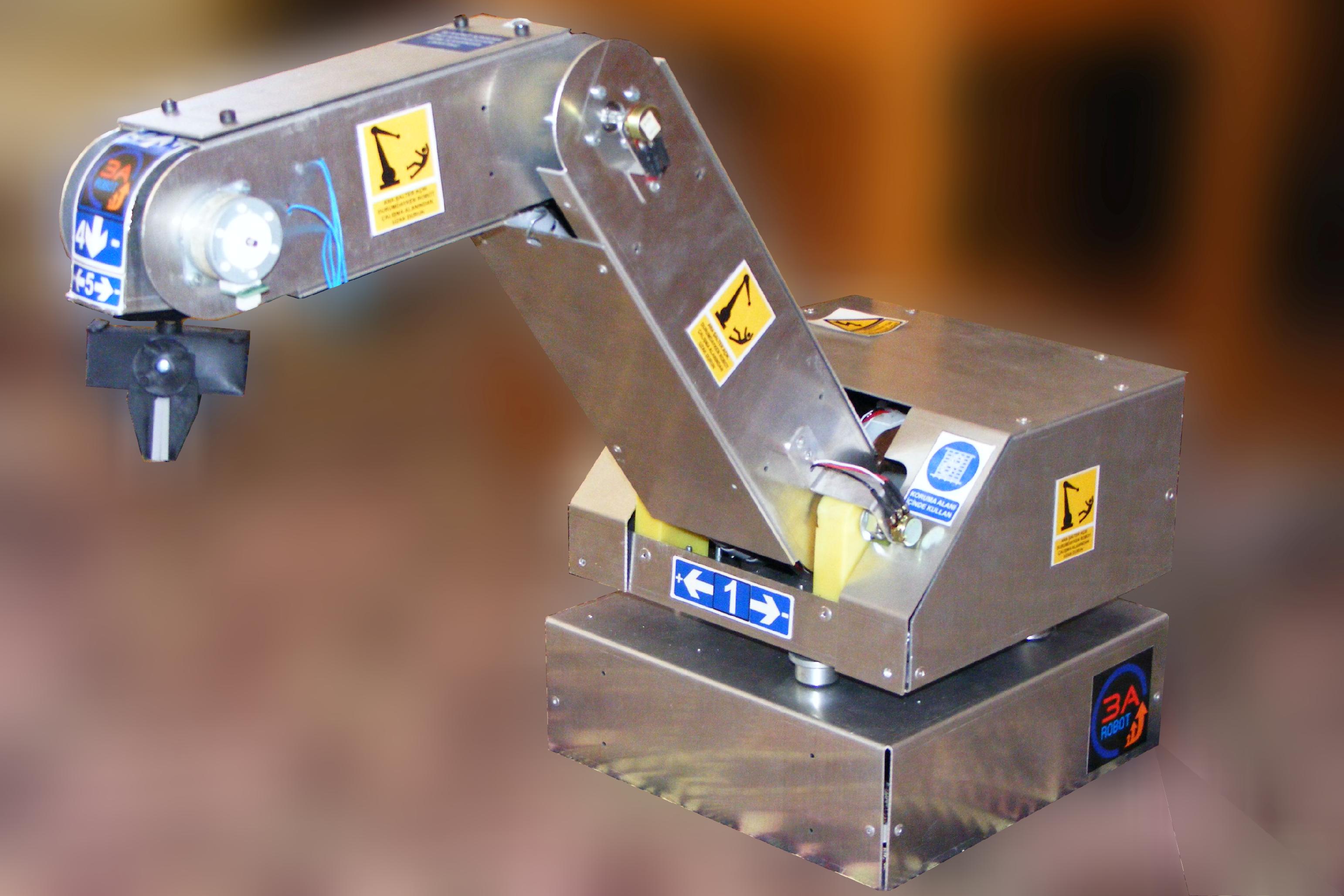
5 Eksenli Robot Kol Uygulaması
“3A ROBOT”
3A ROBOT ve OTOMASYON PROJE GRUBU
www.robotteknolojileri.com
Metin USAN
mu.metinusan@gmail.com
M. İlter ÖZMEN
m.ilterozmen@gmail.com
Altay ARBAK
altay956@gmail.com
İstanbul Üniversitesi
Mühendislik Fakültesi
Makine Mühendisliği Bölümü
Özet
Yapılan bu çalışma, 5 eksene sahip bir robot kolun tamamen yerli kaynaklar kullanılarak elektronik, mekanik ve yazılım bölümlerinin geliştirildiği lisans bitirme tezidir. Yapılan araştırmalar sonucunda prototipin hızlı bir şekilde üretilebilmesi ve kalıp, fikstür gibi ek maliyetler oluşturmaması için robot kolun gövde kısmının sac metal sekilendirme prosesleri ile üretilmesine karar verilmiştir. Elektronik sürücü ünitesi bünyesinde, PID kontrolü barındıran mikro denetleyici tabanlı DA SERVO sürücü devreler ve bu devreler arasındaki iletişimi sağlayan ana devre bulunmaktadır. Robot kontrol yazılımı basic dili ile geliştirilmiş olup geliştirilen yazılımda endüstriyel robot kontrol yazılımlarından esinlenilmiş ve bu doğrultuda bir ara yüz hazırlanmıştır.
Bu çalışmanın amacı yerli kaynaklarla üretilebilen, kabul edilebilir hata sınırları içerisinde çalışacak bir robotun hayata geçirilmesi ve bunu yaparken de maliyetin en az düzeyde tutulmasıdır. Bunu gerçekleştirebilmek için proje maliyetinin yüzdece büyük bir kısmını oluşturan servo sürücüler yerli kaynaklar kullanılarak üretilmiştir. Bir eksene ait servo sistem kalıcı mıknatıslı doğru akım motoru, bu motora ait konum algılayıcı ve elektronik kontrol ünitesinden oluşmaktadır. Endüstriyel uygulamalarda genellikle yüksek güç ihtiyacından dolayı üç fazlı alternatif akım motorları ve sürücüleri tercih edilmektedir. Fakat bu uygulamada kontrol kolaylığı ve maliyet açısından doğru akım motoru kullanılmıştır. Doğru akım motorunu kontrol etmek için mikro denetleyici tabanlı bir kontrol ünitesi ve buna bağlı olarak anahtarlama elemanı metal oksit yarı iletken alan etkili tranzistör (mosfet) olan H köprüsü gerçekleştirilmiştir. Bu uygulamada mosfet kullanılmasının ana nedeni mosfetin iletime ve kesime girme kolaylığı, Ayrıca çalışma frekansının da yüksek oluşudur.
1. Giriş
Gün geçtikçe robotların üretimdeki payının artması ve buna paralel olarak Türkiye’deki ihtiyacın da artması robot teknolojisini geliştirmeyi zorunlu kılmaktadır. Dünyada ortak olarak geliştirilen robot teknolojisine Türkiye’nin de gerekli atılımı yapması gerekmektedir. Ancak bunu yaparken de yurt dışından teknoloji ithal etmekten ziyade kendi kaynaklarımızı ve iş gücümüzü kullanarak geliştirme faaliyetlerinde bulunmamız gerekmektedir. Yapılan bu çalışma kendi teknolojimizi üretme adına atılan bir adım niteliği taşımaktadır.
Çalışmanın başlangıcında 10 mm hata ile robot çalışma uzayında(Resim 2) istenilen noktaya ulaşabilecek ve 400 g kapasiteli bir robot kol üretmek hedeflenmiştir. Bu doğrultuda yük kapasitesinin istenilen değerde olması için gövdede alüminyum sac metal kullanılmıştır. Ayrıca motor tercihinde de bu etken göz önünde bulundurulmuş ve ilk üç eksen için maksimum 140 kg.cm torka sahip doğru akım motorlarının kullanılmasına karar verilmiştir. Ayrıca motorların uç kısmında tümleşik olarak sonsuz vida ve dişli mekanizması bulunmaktadır. Bu mekanizma yeterli torku oluşturabilmesinin yanı sıra motorun enerjisi kesildiğinde tersinir olarak dönmeye izin vermediğinden dolayı robotun frenleme ihtiyacını da ortadan kaldırmış olmaktadır. Aksi takdirde robotun kendi konumunu koruyabilmesi ve dışarıdan gelebilecek kuvvetlere karşı direnç gösterebilmesi için mekanik bir fren kullanılması gerekecektir. Kullanılan doğru akım motorlarına eklenen konum algılayıcılar ile geri besleme mekanizması oluşturulmuştur. Her bir motor için ayrı tasarlanan motor sürücüler ana devreden gelen komutlar doğrultusunda ilgili oldukları motorları hareket ettirmektedir. Robot kontrolü için hazırlanan bilgisayar yazılımında ise ters kinematik hesaplamalar ve kullanıcı ara yüzü hazırlanmıştır. Ayrıca tüm eksenlerin senkronize biçimde çalıştırılabilmesi için motor sürücülere gönderilen komutların düzenlenmesi de robot kontrol yazılımı tarafından gerçekleştirilmektedir.
Fotoğraflar
________________________________________________________________________________
|
|
|
|
|
|
|
|
|
Videolar
_________________________________________________________________________________
5 Eksenli Robot Kol Video 1
5 Eksenli Robot Kol Video 2